| 1.TELESARシステム | 2.作業実験 | 3.むすび | 参考文献・References |
テレイグジスタンスはテレオペレーションシステムの進化したものであり、操縦者が遠隔に存在するロボットを介してあたかも遠隔の環境にいるような感覚を持ち、精密な作業やコミュニケーションを可能にする技術です。我々はテレイグジスタンスを実現するためのロボットとして“TELESAR”を開発しました。操縦者はコンピュータが生成したバーチャル環境やバーチャル空間を介した実環境に「テレイグジスト」することも可能です。我々はテレイグジスタンスの概念を1980年に提唱し、この概念の実現およびロボティクス、設計およびコミュニケーションの分野への応用へ向けて研究を行なってきました。
詳細:下記の論文をWEB用に書き換えてあります。
舘暲,安田賢一:テレイグジスタンス・マニピュレーション・システムの設計と評価,電気学会論文誌C編,Vol.115-C,No.2,pp.172-181(1995.2)
[PDF]
本論文においては、マニピュレーション作業のためのテレイグジスタンスシステムの設計法を具体的に示しテレイグジスタンスの効果を実験的かつ定量的に評価することを目的として、作業用実験システム(TELESAR: (TELExistence Surrogate Anthropomorphic Robot)を構築している。またその試作ハードウェア・システムを用いてテレイグジスタンスを用いるマニピュレーション作業の効果を定量的に評価している。
| 1.TELESARシステム | 2.作業実験 | 3.むすび | 参考文献・References |
1.TELESARシステム
TELESARシステムは、人間型スレーブロボットとその移動装置、テレイグジスタンス作業用マスタ装置、及び作業対象とからなる。図1にテレイグジスタンスシステムTELESARの構成を示す。スレーブロボットは、人間型のロボットで、平面移動のための移動装置を有している。テレイグジスタンス作業用マスタシステムは、操作者(オベレータ)がこれに乗込み、遠隔のロボットとの通信路を確立することにより、オベレータは、その場にいながらにして、遠隔で働くスレーブロボットと自分自身が一体化したような感覚を得ることができる。オベレータの手の運動や首の運動がエンコーダを用いた測定装置で実時間計測され、コンピュータと通信装置を介して、ロボットに送られる。平行リンク構造とユニバーサルジョイント構造によるカウンタバランス機構により、オベレータは頭部の運動を拘束されず、しかも装置の重量を意識せずに、空間内6自由度の運動が自由に行なえるようになっている。
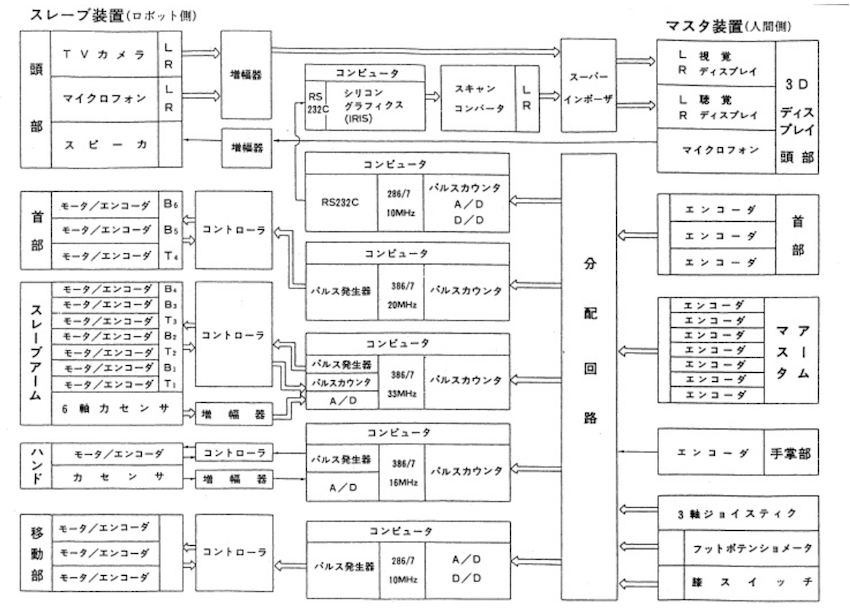
図1 テレイグジスタンス・マニピュレーション作業用システムの構成
1.1 人間型スレーブロボッ卜
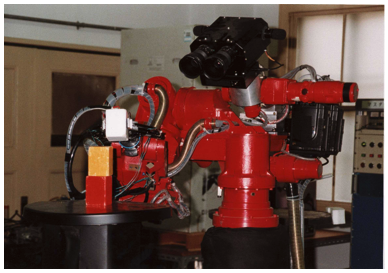
大きさや自由度配置を人間に合わせて設計したテレイグジスタンス用スレーブロボットを図2に示す。この人間型スレーブロボットは、7自由度の右腕(アーム)、1自由度のハンド、3自由度の首機構、1自由度の腰部と合計12自由度を有し、形状や動作範囲を人間に可能なかぎり近づけている。頭部には立体視カメラとマイクロフォンを搭載し、オペレータの運動計測情報に従って実効上時間遅れなくオペレータと同一の方向に制御される。このロボットは、移動機構により平面内の2自由度の並進と1自由度の回転が可能である。ロボットの得た視聴覚情報は、オペレータに送られ、オペレータは頭部に結合された提示装置を使って、ロボットが見たり聞いたりしたのと原理的に同一の歪のない空間を、フルカラーかつ三次元で体験できる。オペレータが作業を行うと、人間と同一の自由度配置に設計された7自由度のスレーブアーム機構が、その動作を忠実に再現する。オペレータは、自分の腕の存在する場所にロボットのアームを見て、視聴覚情報と姿勢・運動感覚情報が整合した状態で作業を行える。
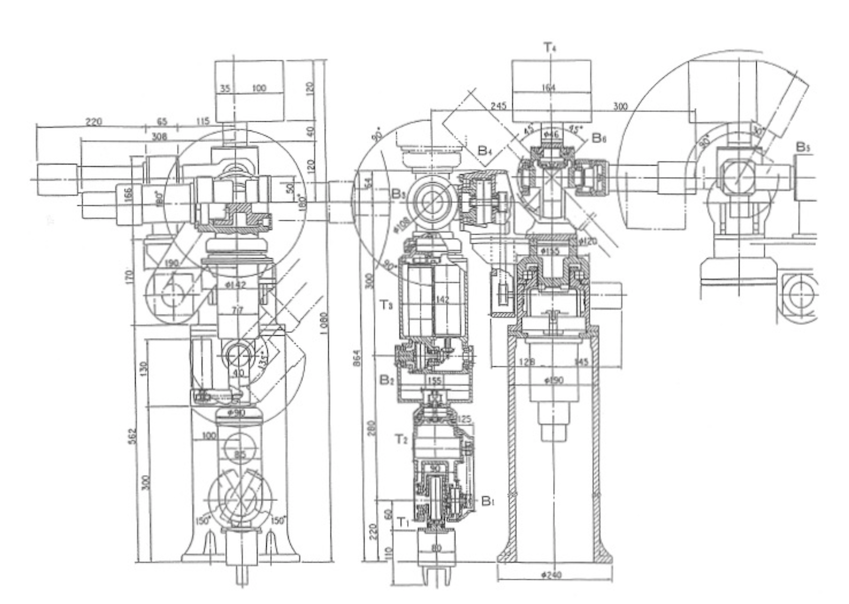
図2 人間型スレーブロボット
(1)スレーブアーム・首・ハンド
人間型ロボットのスレーブアームの肩部は、胴体側から前後(B4)、左右(B3)、回内外(T3)で、それらの回転軸は一点で変わる。肘は、屈曲(B2)と回転(T2)、手首部も屈曲(Bl)と回転(Tl)からなっている。首は、3軸のジンバルで、首のかしげ(B6)とチルト(B5)のあとにパン(T4)が配置され、それぞれの回転軸は1点で変わる。先端の位置決め精度は士1mm、可搬重量は1kg先端最大速度3m/secで動作可能である。図3にスレーブハンドを示す。スレーブハンドは1自由度の挟み動作を行う。一般に1自由度の挟み動作では、物体の2方向からの支持となり大きな物体の把握時には不安定となりやすいが、ボールネジと平行リンクの紺合せにより物体の支持が3点できるため安定な握りが可能の構造に設計している。ハンドの最大開き幅は124mm、把握力は平均5kgで、指部材には把握力計測のために歪ゲージを貼付してあり、この情報を用いて力制御が可能である。開き幅の計測はモータ軸端のエンコーダにより行っており、平均分解能10µmの位置制御が可能である。また、アームとハンドの間に6軸のカ・トルクセンサ(力分解能3gf)を配しており、このセンサからのカ・トルク情報を利用してメカニカルインピーダンスの制御を行うことができる。なお、スレーブアームの位置精度と可搬重量を低下させないよう、極力軽量化を行っている。リンク部材はジュラルミン製で、カセンサを含めたハンド総質量は620gである。
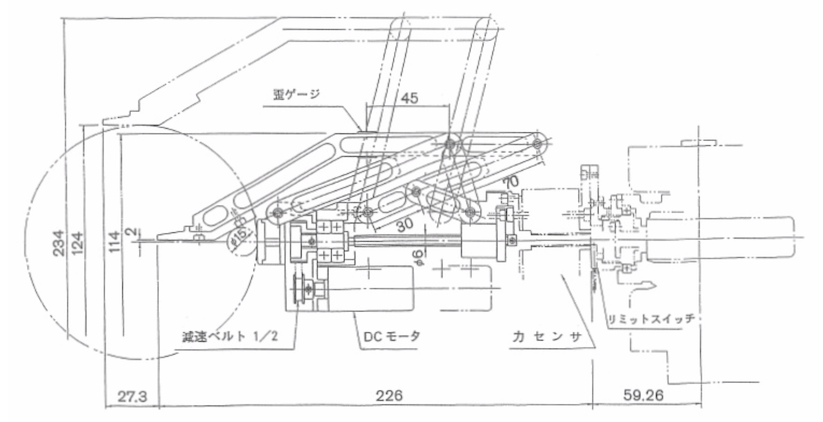
図3 スレーブハンドの構造
(2)視聴覚入力部
42万素子のカラーCCDを用いたビデオカメラのヘッド部を2台用いて視覚入力部を構成している。レンズ系は焦点距離がf=12~72mmでレンズの明るさがF1.6のズーム系であり、それを提示系との関係から40度の視野となるようにf=15mmで利用している。焦点はTTL方式のオートフォーカスで調節している。2台のカメラの中心間距離は65mmとし、光軸は互いに平行に配している。マイクロフォンは、左右のマイクロフォン端面の幅を243mmとし、提示装置の後述の提示用スピカーと位置関係をあわせてある。また、脹と肩の位置関係も平均的な人間の位置関係にあわせて配置してある。
(3)移動機構
図4にスレーブロボットの移動装置の構成と可動範囲を示す。マスタ装置に配したジョイスティックによるスレーブの移動には次のような三種類のモードが可能である。
1)ジョイント座標系動作:ジョイスティックの3軸に対応して、3軸それぞれ独立に動作する。
2)ワールド座標系動作:3軸が協調してワ―ルド座標系で直交動作する。
3)ボデイ座標系動作:3軸が協調してロボットのボデイに固定された座標系で直交動作する。
これらは制御を司るCPU(286+287 10MHz)によって選択される。また、ティーチングプレイバックを行うことができ、"MOVJ"(ジョイント動作)や"MOVL"(直交動作)などの簡単なロボット言語によって所望の軌道復元をすることもできる(ただし本実験ではプレイバック機能は利用していない)。
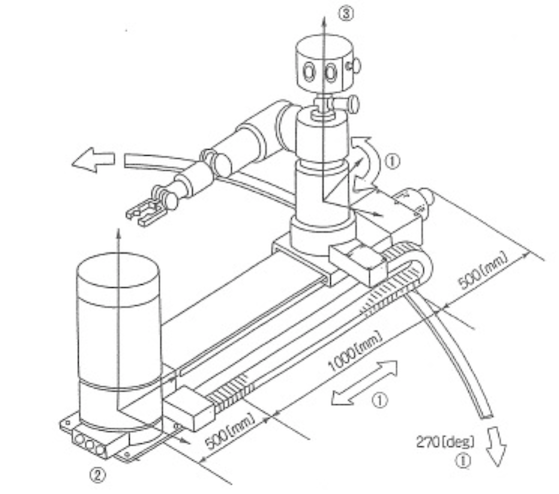
図4 移動機構
1.2 テレイグジスタンスマスタ装置
マスタ装置の構成を図5に示す。マスタ装置はオペレータにロボットからの臨場的な3次元視聴覚情報を提示するための視聴覚情報提示部、視聴覚提示部の重量を支えつつ拘束することなくオペレータの頭部運動を計測することのできる頭部運動計測部、オペレータの右腕の運動を計測するマスタアーム部、3軸のジョィスティク等その他の機能部から構成されている。
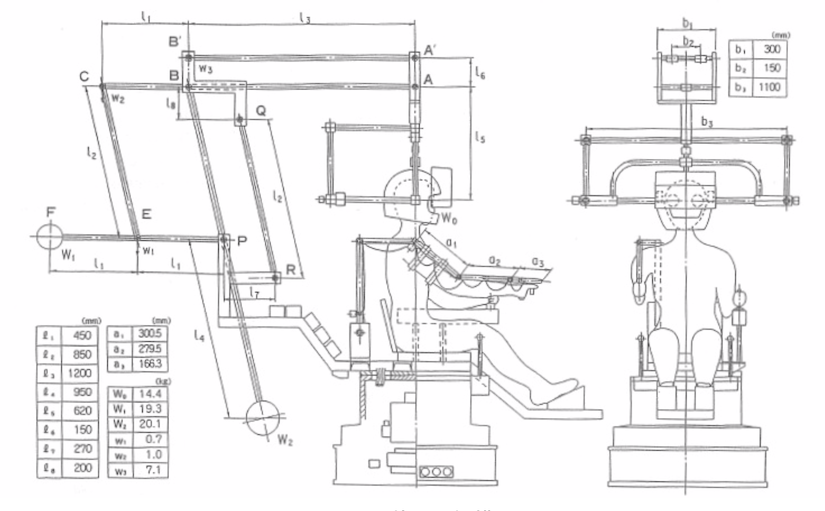
図5 マスタ装置の機構図
(1)視聴覚情報提示部
基本的に、著者らが提案した視覚情報提示系の設計法[舘、荒井1989]に基づき設計されている。作業用の視聴覚情報提示部であることを考慮して画像の分解能を重視して設計している。表示部としては6インチの液晶デイスプレイ(以下LCDと略す)利用し、周辺回路をカウンタバランスとして用いるように配置に工夫をこらした。手による補助なしでも素速い動きが可能なように頭部への固定法として密着度の高いフルフェイスのヘルメットを用いている。着脱機構によりヘルメットを交換することでオペレータの頭部のサイズの差異にも対応できる。総質量は5.5kg(内ヘルメット1.4kg)であり、提示部の構成を工夫して慣性モーメントを小さく押さえている。LCDにはRGB信号入力の6インチ(H720xV240ピクセル)の素子を用いた。また、2枚のミラーによって光路を立体的に構成することによりLCDの提示面を図6において紙面と平行になるように配置し、コンパクトな光学系となるよう工夫している。これによって作業時にオペレータの手が自由に運動できるために必要となる顔前方の空間が確保されている。
接眼レンズはLCD上の映像の虚像提示距離が1mになるように設定し水晶体の調節による影響を最小限にしている。また不用な鏡像は偏光板によって視界から除去した。2枚のLCDの等価的な中心間距離は65mm、視野角は単眼40度で視野角の足りない部分は首の自由な動きで補う。解像度は実測で1,000mm地点で1mm(視力換算で0.3)を得ており、スレーブロボットの手先の位置決め精度を上まわっている。なお、LCDおよびレンズの曇り防止のために送風ファンを内蔵しており、これにより長時間の連続着用を行っても視界が悪化することなく作業が可能となる。詳しくは文献[前田、舘1992]を参照されたい。
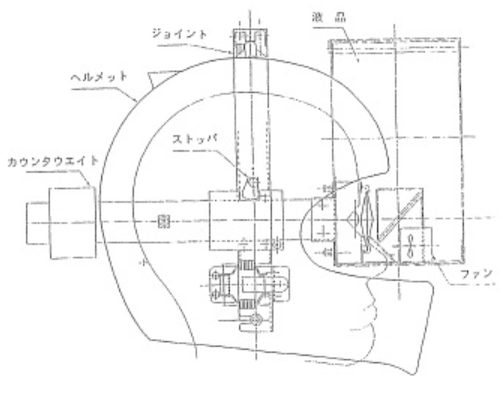
図6 頭部搭載型視聴覚情報デイスプレイ
(2)頭部連動計測部
オペレータの頭部の空間内における並進3自由度、回転3自由度の運動を非拘束かつ実時間で計測しつつ、提示装置の重量を支持して、オペレータの運動に従い、常にオペレータの前方に三次元の視野を確保するための機構が必要である。本方式は、平行リンクを用いたアクチュエータを内蔵しないセンサのみを有するパッシブ型であり、計測後のデータの実時間処理を容易にするため、機構そのものを並進3軸と回転3軸とが干渉しないようなメカニズムとして設計した。また、慣性についてはパッシブ方式のため除去できないが、可能な限り小さくし、かつ、並進3方向の慣性の大きさのアンバランスができるだけ少なくなるように工夫している。オペレータによる頭部の運動は、リンクに取り付けられた六つのエンコーダによって計測され、姿勢3軸と並進3軸を相互の干渉を排除した状態で測定することが可能である。
このリンク機構の全体の重心は、P点に固定され、どのような姿勢をとっても変化しないように設計されている。それに加えて、AA'の方向が、A点の運動に対して変化せず一定となるように別の平行リンクAA'-BB'と、BP-QRを付加してある。
上記の考案は、紙面に含まれる正中面内での垂直の運動に対してであるが、紙面に対して垂直な方向の額面内での水平の運動については、3本の平行リンクとユニバーサルジョイントにより実現する。すなわち、水平の運動と垂直の運動とをユニバーサルジョイントで分離し、垂直の運動は前記のリンク構造で、水平の運動に対しては上部の2本の平行リンクで実現している。回転運動については、ジンバル構造を用いている。どのような姿勢でも最も重要なパンの方向の回転が、その姿勢の座標系に対して行えるような自由度配置を工夫している。また、首のかしげの方向の運動のためには別の平行リンクを用いている。なお、提示部ジンバル構造の後部に設けたリンク構造は、ジンバルを支えるためのリンクであり、重力は支えるが運動は全く拘束しない。動作範囲はX軸方向1,100mm、Y軸方向600mm、Z軸方向900mmである。
(3)マスタアーム
スーブアームと同様に人間と形状と自由度配置を類似させたマスタアームを構成している。自由度は7自由度で冗長自由度を有する。各関節には72,000pulse/revolutionの高分解能エンコーダを用いている。このマスタアームはスレーブアームと同構造かつ同形で、マスタアーム先端のハンド部を握り、肩と前腕部を密着させるようにして操作することにより、オペレータの腕の7自由度の連動を拘束感なく実時間で計測することができる。また、本装置はこの7自由度にさらに3自由度を加え、人間の体幹の移動に対して追従し得るように構成しているが、この追加3自由度は本論文の実験では固定し利用していない。なお、マスタアームには、スレーブハンド開閉用のポテンショメータと補助スイッチが取り付けられている。
(4)その他の機能
右手でスレーブアームを操作するほかに、移動用テレイグジスタンス操縦や機能拡張のための3軸のジョイスティックが左手で使用できるようになっている。左右の両足には、それぞれフットポテンショメータが配されている。腰部の回転に対応したアクチュエータが椅子の下に組込まれており、左右の膝ポテンショメータで指示され、マスタ機構全休が回転する。ただし、フットポテンショメータと膝ポテンショメータは本論文の実験では用いていない。
1.3 制御システム
図1に示したようにオペレータの運動や状態がエンコーダ、カ・トルクセンサ、ポテンショメータ等で計測され、5台のパーソナルコンピュータに配したアップドウン・カウンタやA/D変換ボード、D/Dボードを介して取り込まれる。コンピュータではマスタ・スレーブ機構のモデルに基づいて計算により人間の頭部運動、上肢運動、ハンドの開閉などの状態が推定される。これらの情報がコントローラに送られロボットが制御される。5台のパーソナルコンピュータの内の1台はVR環境構成用のワークステーションにオペレータの運動情報を送るために利用されるが[大山、常本、舘、井上1994]、本実験ではこの機能は利用していない。
本システムはオペレータの運動情報に基づいてすべてのサブシステムが制御される方式になっており、従って連動指令によりコンピュータ間の同期が自然にかかる仕組になっている。スレーブアームの制御は、位置指令に基づくインビーダンス制御を基本としている[井上、舘、荒井1992]。インピーダンス制御の詳細は文献[井上、舘、荒井1992]を参照されたい。なお、プログラムはC言語で書かれており、プログラムサイズは頭部制御、上肢制御、ハンド制御、移動制御それぞれ11,572、76,983、22,611、86,375バイトであり、インピーダンス制御時でも3ms以下のサイクルタイムを実現している。
| 1.TELESARシステム | 2.作業実験 | 3.むすび | 参考文献・References |
2.作業実験
テレイグジスタンスの最も特徴的な点は、人間が実効的に存在する環境が(1)人間にとって自然な3次元空間を構成しており(三次元の空間性)、(2)人間がそのなかで環境との実時間の相互作用を行いながら自由に行動でき(実時間相互作用)、かつ(3)その環境と使用している人間とがシームレスになっていて環境に入り込んだ状態が作られているということ(自己投射性)である。すなわち理想的には、(1)では、視覚、聴覚、触覚、嗅覚、味覚のいわゆる五感と呼ばれる外界情報と、体性感覚などの内界情報が整合性を保った形で人間に提供されなければならない。これは、ロボットを用いるテレイグジスタンスは、ロボットが人間の動きに従って外界から得た情報を人間の身体形状や身休の運動状態と矛盾しない形で忠実に再現することにあたる。(2)は、ロボットが自由に環境内を行動できることであり、(3)は、自己の分身の存在であり、自分がその分身に投射された感覚を意味する。ロボットを用いるテレイグジスタンスでは、人間型のロボットにより自分自身を遠隔環境に投影する。例えば、自分の手のあるところに、ロボットの手がみえ、自分がロボットになりきった、ないしは、ロボットのなかに入り込んだ(ロボットの身体をもった)感覚を生じさせる。
大画面などによる一般的な臨場感覚と自己投射性の違いは、次のように説明できよう。自己投射性のあるシステムでは、自分の周りも含めすべてを実環境でなくバーチャル環境(遠隔環境)にかえられる。すなわち、全周囲の大画面などではまわりの環境はバーチャル環境であっても自分自身は実環境にいる自分であり、自分の手や身体が見えている。一方、自己投射性があると環境のみではなく、自分自身もが、バーチャル環境内の自分となる。従って、そこで見える自分の手は実際の自分の手があるべき位置に見えるロボットの手であり、バーチャルな手である。それらが、ロボットの眼をかりて観察される。
従来のテレオペレーションは、実時間相互作用性を有し、臨場感もある程度在るが、自己投射性に欠けていた。これに、自己投射性を加えたシステムがテレイグジスタンスによるロボット制御システムであるといえよう。
従って、テレイグジスタンス・マスタ・スレーブ作業システムの主な特徴は、以下の2項目にまとめられる。
首の動きに連動した広視野で自然な3次元視聴覚が得られる。
視覚と休性感覚(固有受容感覚)の対応が自然である。すなわち、常にオペレータの腕のあるところに対応してロボットの腕が視野内に見える状態で作業ができる。
上記の二つの特徴の効果を定量化するために基本的には、
a)テレイグジスタンスマスタスレーブ作業システムによる実験、
b)上記の視覚情報提示を両眼立体視とせず、人間の両眼にカメラからの単眼情報を与えた場合の実験、
c)従来の遠隔操作のように、首の位置とは別の場所に固定した広角カメラで映像をとりそれをモニタテレビで見ながらの作業実験、
の3種類を以下に示す2種類の定量的な評価実験を行うことにより比較した。ただし、聴覚情報については本論文の実験では用いていない。
2.1 追従特性による評価実験
図7に実験の概観を示し、図8に実験システムのブロック図を示す。目標位置入力装置には1軸のスライダ(ストローク200mm)を用い、これをロボットが向いている方向に対して、認識するのが最も不利だと思われる奥行方向に設置する。そして、オペレータがマスタアームを操作することでスレーブロボットの手先を制御し、1軸スライダに取り付けられた指標に追従する。
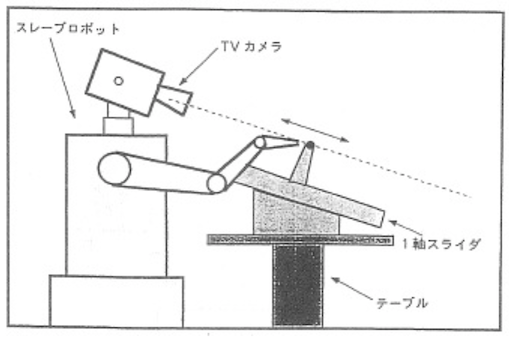
図7 追従実験の概観
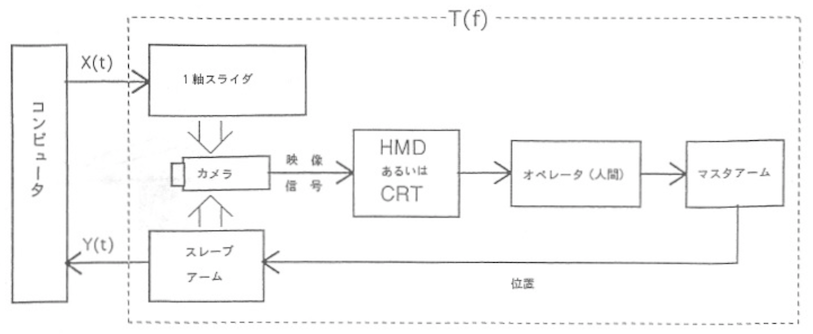
図8 追従システムのブロック図
1軸スライダヘの目標位置入力x(t)には疑似ランダム、信号、

(p=1.25、n=l7、f0=0.0326Hz、φkは乱数)を用いる。
なお、a_0p^(-k)により高周波ほど振幅を減少させ、φkを用いて各周波数成分が互いに独立となるように工夫している。さて、オペレータは種々の提示装置を介してスライダの指標を観測し、マスタアームによりスレーブロボットアームを制御し、スレーブハンドの先端が指標に追従するように追従制御を行う。その際のマスタアームの運動軌跡からスライダ方向の成分y(t)を実時間で求める。
また、マスタ・スレーブ、及び、1軸スタイダの制御周期は10msec、位置データのサンプリング周期は30msecである。ここで、1,024点のサンプリング結果をフーリエ変換し、人力信号のパワースペクトルと入出力間のクロススペクトルの比を求めることによって、オペレータを含んだシステムのシステム関数T(f)が推定される。

ここで評価すべき、オペレータを含んだ提示・操作系のシステム関数T(f)は
で与えられる。ただし*は複素共役、E[ ]はアンサンブル平均を意味する。
x(t)n(t)を信号と独立な正規の観測雑音として、プログラム上ではx(t)、y(t)+n(t)の1,024点のサンプリング結果のFourier変換をそれぞれX(f)、Y(f)+N(f)とし、これのアンサンブル平均から相互スペクトルΦxy、自己スペクトルΦxxを求める。
前述の実験を視覚提示系を以下の5種類として5名(全員30才台の男性)の被験者に対して行った。
[1]直接視:スレーブアームは用いず直接にターゲットを観察しマスタアームで直接追従させる;
[2]HMD(B):頭部搭載型提示装置(以下HMDと略す)を用いた両眼立体視提示;ロボット搭載の立体視カメラ;カメラのピッチ、ロール、ヨーの3方向はオペレータの頭部運動に実時間に連動;
[3]HMD(M):HMD用いた単眼視提示;ロボット搭載のカメラの一つを利用;カメラのピッチ、ロール、ヨーの3方向はオペレータの頭部運動に実時間に連動;
[4]CRT(H):CRTを用いた単眼視提示(オペレータの正面に視野角45度で提示);ロボット搭載のカメラの一つを利用;カメラは固定;
[5]CRT(O):CRTを用いた単眼視提示(オペレータの正面に視野角45度で提示);ロボットとは別の位置に設置されたカメラを利用;カメラは固定;
ただし、[3]、[4]の場合はHMDやCRTにロボット頭部のカメラの右眼像だけを提示する。CRTは25インチのTVモニタを使用した。
この実験によって得られたシステム関数T(f)の例を図9に示す。
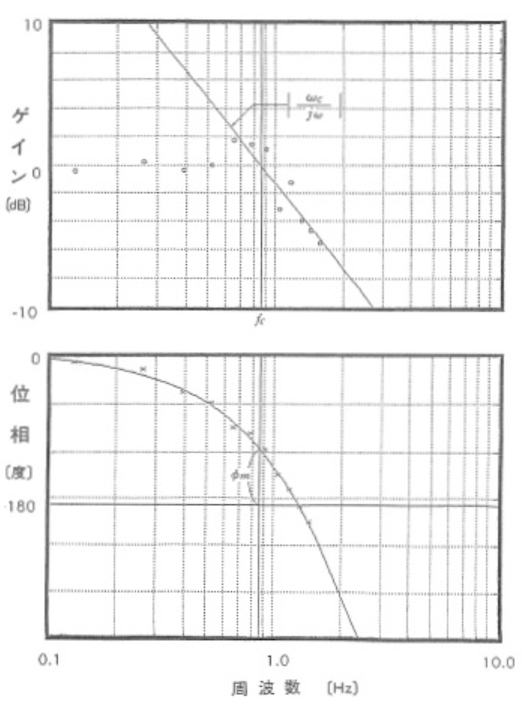
図9 システム関数の一例
追従作業時の人間のシステム関数の振幅(利得)と位相は周波数の関数となっており、第一次近似としてクロスオーバモデルがあてはまることが知られている。クロスオーバモデルによれば、システム関数T(f)はクロスオーバ周波数fcの附近では次式により記述される。

ここで、Keは実験に利用した提示装置を用いた時のオペレータの等価利得であり、Teは反応時間と神経系と筋肉系に由来する等価時間遅れであり、次式で示される。
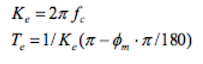
ただし、Pcをクロスオーバ周波fcにおける位相として位相余裕φmをφm=180-Pcとして測定する。
このようにして、種々の提示装置を用いたオペレータの追従特性は、提示装置の良さにより定まり、それは等価利得の上昇、等価時間遅れの減少として定量的に現れる。
図10に横軸にTe、縦軸にfcをとって各種提示装置を比較している。
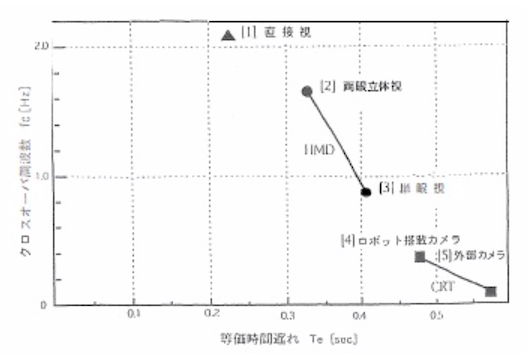
図10 比較結果
横軸は原点に近いほど、縦軸は原点から遠いほど、すなわち左上ほど性能が良いことにあたる。図中の[1]は直接視の場合であり最高の状態を示している。[2]と[3]の差は両眼立体視の効果を示している。両眼立体視の方が追従誤差が小さく、周波数特性も良いことがわかる。この追従実験のように奥行方向の知覚を必要とする場合は単眼視は不利であることがいえる。[3]と[4]の差はHMDの場合とCRTの場合でこの場合ともに単眼視ではあるが、HMDではオペレータの首の動きに連動して画像が提示されるので、単眼視でもある程度運動視差によって奥行知覚が生じるための効果であると考えられる。[4]と[5]の差は視覚と腕の自然な対応の効果を示しており、ロボット頭部のカメラでの実験の方が優れていることがわかる。
テレイグジスタンスの大きな特徴の一つとして自分の腕の見えるべき位置にスレーブロボットの腕が見える状態で作業が行えなければならず、これによって人間の感覚機能と運動機能の統合能力がロボットに反映されスムーズな作業が可能となる。この結果はこのことを顕著に表している。
この結果はすべての被験者に対して傾向としては同一であるが、Teやfcの絶対値は被験者によって異なる。そこで次式に示す指標を用いて平均化を試みた。
ただし、iは提示条件の番号である。
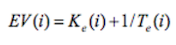
図11にEV(i)で規格化した5名の平均データを示す。図10で表われていた提示装置間の差異が顕著に定量化されて見られる。
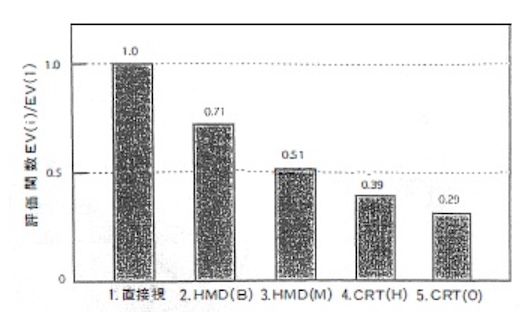
図11 比較結果
因みに、テレイグジスタンス方式[2]によっても直接視[1]には及ばないが、これは、[1]ではスレーブアームを用いていないため、そのダイナミックスによる遅れや利得の低下がないことの影響と、直接視とテレイグジスタンス視の視覚システムとしての優劣による影響が複合して現れているためと思われる。この二つの影響の分離は今後の課題である。
2.2 実験II作業による評価
テレイグジスタンス視覚システムを用いた作業性の評価を行うため、図12に示す前述のマスタスレーブ装置を用い、図13に示すような対象物の操作実験を行った。対象物は、高さ62mm幅43mm厚さ43mmで質量65gの直方体の三つの積木を用いた。この積木を図13のようにテーブルの上にランダムに配置しておき、ランダムに設定した初期位置からアームがテーブルにとどく位置までロボットをジョイスティックで移動させ、それからテーブル上の三つの積木を積み重ねる作業を行う。この時、移動開始の合図から積木を積み重ね終わるまでの時間を計測する。

図12 実験風景(左:マスタ装置;右:マスタースレーブシステム)
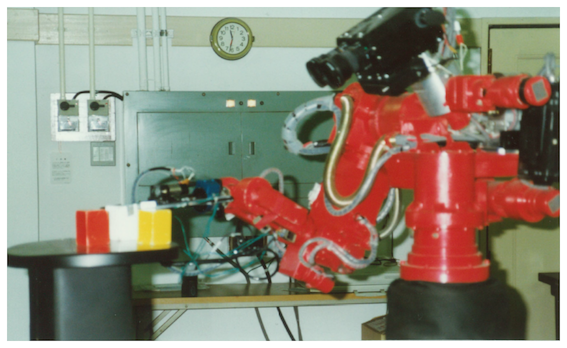
図13 実験風景(積み木の作業)
この実験ではロボットに上半身運動追従機能を付与し、運動視の効果も合せ評価した。この機能はロボットの移動部の持つ並進3軸のうち、X軸、Y軸の2軸を使用して椅子に腰掛けたオペレータの頭部の平面並進運動を捉えることによってスレーブをその運動に追従させようとするものである。のぞき込みなどの効果によって視野領域が広がると共に、オペレータの左右の揺動によって運動視の効果が上がり、奥行知覚の効率が向上されることが期待される。
比較方法として、両眼視と単眼視を大きな分類とし、そのそれぞれの場合に、上半身追従機能を付加するかしないかで分類した。また、単眼視の場合は、HMDだけでなくCRTモニタについても実験を行った。CRTは25インチのTVモニタを使用し、オペレータの目の高さにその中心をあわせ、さらにHMDの視野角が40°であることからCRTの視野角も40°以上になるように目の位置から画像までの距離を決定した。この場合もまたスレーブロボットの右眼像だけを提示する。但し、CRTの場合、当然ながらHMDを装着しないで作業を行うので、上半身運動追従機能は付加せず、また、オペレータの頭郭の運動は無視される。従って実際には、スレーブロボットの首を、テーブルに対して前後の移動を行っても対象物が視野からはずれないような角度(45deg)に固定して作業を行った。
以上まとめると次のような五つの条件で比較することになる。
(1)CRT(O):CRTと外部カメラ
(2)CRT(H):CRTとロボット搭載カメラの単眼
(3)HMDによる単眼視:HMD(M)と頭綿運動連動のロボット搭載カメラの単眼
(4)HMDによる両眼視:HMD(B)と頭部運動連動のロボット搭載カメラの両眼
(5)HMDによる単眼視で上半身運動追従機能を付加:HMD(M+)
(6)HMDによる両眼視で上半身運動追従機能を付加:HMD(B+)
この条件下での実験をそれぞれ8回ずつ行い、1回につき(1)→(2)→(3)→(4)→(5)→(6)の順番で同じ初期位置から作業を行う。習熟による影響はないものと見なせる時点で実験を打ち切った。実験は20代半ばの男子4名について行った。
実験では同じ条件でも初期位置によって作業を行うのに1~2秒の差がある。従って、次の式でデータを正規化することで初期位置によるデータのばらつきを取り除いた。
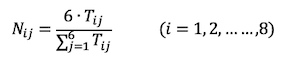
N_ij=(6∙T_ij)/(∑_(j=1)^6▒T_ij) (i=1,2,……,8)
ここで、Tijはi回目の条件jの作業の所要時間、Nijは正規化したデータである。このNijの4名の平均と標準偏差を図14に示している。
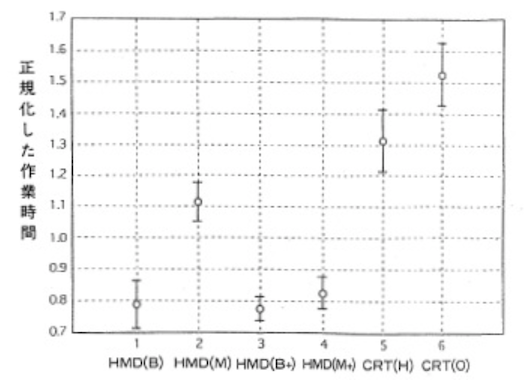
図14 比較結果
この結果、実験1でみられた両眼視の効果[HMD(B)とHMD(M)の差]、自然な目と手の位置関係の効果[CRT(H)とCRT(O)の差]及び頭部運動追従の効果[HMD(H)とCRT(H)の差]が実験2における実際の作業においても、はっきりと認められる。すなわち、危険率5%でt検定を行った結果、HMD(B)とHMD(M);CRT(H)とCRT(O);HMD(M)とCRT(H)のそれぞれについて有意差か認められた。
実験2の作業実験において追加した上半身運動追従の効果は両眼視では顕著ではなかったが、単眼視においては極めて顕著にあらわれており追従する方が1.4倍ほど優れている(危険率1%のt検定で有意差が認められた)。これは単眼のみでは奥行感覚はなく対象物の大きさのみが距離の手がかりとなるが、オペレータの上半身の運動にロボットが追従することにより横移動による運動視の効果が現れ、単眼でも両眼で行っているのと同等の奥行知覚を生じるためと考えられる。一方、両眼視の状態で上半身運動追従の効果が現れなかったということから、本システムのHMDによる両眼視で作業に必要な奥行き知覚がほぼ得られていると言える。しかし、この場合でも、この柔軟な運動機能を効果的に使用することにより一層の効率的な作業を行うことができることが期待できることは言うまでもない。
| 1.TELESARシステム | 2.作業実験 | 3.むすび | 参考文献・References |
3.むすび
スレーブロボットをいわばバーチャルな外骨格型人力増幅機として遠隔から制御するテレイグジスタンス・ロボット制御の具体的な設計法をテレイグジスタンス・マニピュレーション・システムを設計試作することで具体的に示し、その効果を追従実験と作業実験を介して定量的に評価した。
テレイグジスタンスの最大の特徴は、ロボット自体も含む対象物や環境の情報を直接その場でロボットの視座からみたのと同等の物体や環境の大きさや距離感を有する空間情報として遠隔のオペレータに伝達すること(正確な臨場的空間再現)と、オペレータの体性感覚と視聴覚情報が矛盾なく再現され、あたかもロボットのなかに入り込んだような自己と環境の位置関係が実現すること(自己投射性)である。
これらの効果を試作したテレイグジスタンス・システムをもちいた追従実験と作業実験を行うことにより、自然な両眼立体視の効果、頭部運動追従の効果、上体運動追従の効果、自然な目と手の位置配置の効果として分析しつつ定量的に調べ、テレイグジスタンス方式の優位性を定量的に評価した。
| 1.TELESARシステム | 2.作業実験 | 3.むすび | 参考文献・References |
参考文献・References
参考文献
1) 舘 暲,阿部稔:テレイグジスタンスの研究 (第1報) ―視覚ディスプレイの設計—,第21回計測自動制御学会学術講演会予稿集, pp.167~168 (1982-7) [PDF]
2) 舘 暲,谷江和雄,小森谷清:盲人用歩行補助器評価装置, 特許第1462696号, 出願1980年12月26日 [科学技術庁長官選定第42回注目発明][PDF]
3) 舘 暲,谷江和雄,小森谷清:感覚情報呈示機能をもったマニピュレータの操縦方式,特許第1458263 号,出願1981年1月14日[PDF]
4) 舘 暲, 荒井裕彦: テレイグジスタンスにおける視覚情報提示系の設計と評価, 日本ロボット学会誌, Vol.7, No.4, pp.314-326 (1989.8)[PDF]
5) 舘 暲, 榊 泰輔: インピーダンス制御型マスタ・スレーブ・システム (I) −基本原理と伝送遅れへの応用−, 日本ロボット学会誌, Vol.8, No.3, pp.241-252 (1990.6)[PDF]
6) 榊 泰輔, 舘 暲: インピーダンス制御型マスタ・スレーブ・システム (II) −操作感の変更と操作能力の拡張−, 日本ロボット学会誌, Vol.8, No.3, pp.253-264 (1990.6)[PDF]
7) 舘 暲, 前田太郎: 人工現実感を有するテレイグジスタンスロボットシミュレータ, 電子情報通信学会論文誌 D-II, Vol.J75-D-II, No.2, pp.179-189 (1992.2)[PDF]
8) 榊 泰輔, 舘 暲: インピーダンス制御型マスタ・スレーブ・システム (III) (一般化したシステムによる理想的なバイラテラル応答特性の実現), 日本ロボット学会誌, Vol.10, No.3, pp.114-117 (1992.6)[PDF]
9) 井上康之, 舘 暲, 荒井裕彦: マスタスレーブ・マニピュレータのインピーダンス制御の一方法, 日本ロボット学会誌, Vol.10, No.4, pp.490-500 (1992.8)[PDF]
10) 前田太郎, 荒井裕彦, 舘 暲: 頭部運動追従型両眼視覚提示装置の設計と評価, 日本ロボット学会誌, Vol.10, No.5, pp.99-109 (1992.9)[PDF]
11) 大山英明, 常本直貴, 前田太郎, 舘 暲: 仮想環境へのテレイグジスタンスのための一手法, 日本ロボット学会誌, Vol.12, No.8, pp.1175-1182 (1994.11)[PDF]
12) 大山 英明, 常本 直貴, 舘 暲, 井上康之: 仮想環境と実環境の重ね合わせの一手法, 日本ロボット学会誌, Vol.12, No.2, pp.272-281 (1994.3)[PDF]
13) 舘 暲,安田 賢一: テレイグジスタンス・マニピュレーション・システムの設計と評価, 電気学会論文誌 C 編, Vol.115-C, No.2, pp.172-181 (1995.2)[PDF]
14) 柳田 康幸, 舘 暲: クラスを用いた仮想環境の構成法, 電気学会論文誌 C 編, Vol.115-C, No.2, pp.236-244 (1995.2)[PDF]
15) 榊 泰輔, 舘 暲: 相似バイラテラル制御による操作感覚の増幅, 日本ロボット学会誌, Vol.13, No.3, pp.441-448 (1995.4)[PDF]
16) 柳田 康幸, 舘 暲: HMD型テレイグジスタンスシステムの頭部運動時における視野角不整合の影響, 日本バーチャルリアリティ学会論文誌, Vol.7, No.1, pp.69-78 (2002.3)
【日本バーチャルリアリティ学会 論文賞】[PDF]
References
1) S. Tachi, K. Tanie, K. Komoriya and M. Kaneko: Tele-existence (I) :Design and Evaluation of a Visual Display with Sensation of Presence, Proceedings of RoManSy'84 The Fifth CISM-IFToMM Symposium, pp. 245-254, Udine, Italy (1984.6) [PDF]
2) S. Tachi and H. Arai: Study on Tele-existence(II)-Three Dimensional Color Display with Sensation of Presence-, Proceedings of the '85 ICAR(International Conference on Advanced Robotics), pp. 345-352, Tokyo, Japan (1985.9) [PDF]
3) S. Tachi, H. Arai, I. Morimoto and G. Seet: Feasibility Experiments on a Mobile Tele-existence System, Proceedings of The International Symposium and Exposition on Robots, pp. 625-636, Sydney, Australia (1988.11) [PDF]
4) S. Tachi, H. Arai and T. Maeda: Robotic Tele-existence, Proceedings of the NASA Conference on Space Telerobotics, pp. 171-180, Pasadena, California, USA (1989.1)[PDF]
5) S. Tachi, H. Arai and T. Maeda: Development of an Anthropomorphic Tele-existence Slave Robot, Proceedings of the International Conference on Advanced Mechatronics, pp.385-390, Tokyo, Japan (1989.5) [PDF]
6) S. Tachi, H. Arai and T. Maeda: Tele-existence Visual Display for Remote Manipulation with a Realitime Sensation of Presence, Proceedings of the 20th International Symposium on Industrial Robots, pp.427-434, Tokyo, Japan (1989.10) [PDF]
7) S. Tachi: Tele-existence and / or Cybernetic Interface Studies in Japan, Human Machine Interface for Teleoperators and Virtual Environments, NASA Conference Publication, pp. 34-35, Santa Barbara, California, U.S.A (1990.3) [PDF]
8) S. Tachi, H. Arai and T. Maeda: Tele-existence master Slave System for Remote Manipulation, Proceedings of the IEEE International Workshop on Intelligent Robotics and Systems '90 (IROS '90), pp.343-348, Tsuchiura, Japan (1990.7)[PDF]
9) S. Tachi, H. Arai and T. Maeda: Tele-existence Master Slave System for Remote Manipulation (II), Proceedings of the 29th IEEE Conference on Decision and Control, Vol.1, pp.85-90, Honolulu, Hawaii, USA (1990.12)[PDF]
10) S. Tachi, H. Arai, T. Maeda, E. Oyama, T. Tsunemoto and Y. Inoue: Tele-existence Experimental System for Remote Operation with a Sensation of Presence, Proceedings of '91 International Symposium on Advanced Robot Technology ('91 ISART), pp.451-458, Tokyo, Japan (1991.3)[PDF]
11) S. Tachi, H. Arai and T. Maeda: Tele-existence Master Slave System for Remote Manipulation, Video Proceedings of the International Conference on Robotics and Automation, G1, Sacrament, California, USA (1991.4) >>YouTube
12) S. Tachi, H. Arai, T. Maeda, E. Oyama, N. Tsunemoto and Y. Inoue: Tele-existence in Real World and Virtual World , Proceedings of the fifth International Conference on Advanced Robotics ('91 ICAR), pp.193-198, Pisa, Italy (1991.6) (Invited Paper) [PDF]
13) S. Tachi: Sensor and Sensing Systems in Advanced Robotics , Digest of Technical Papers of the 1991 International Conference on Solid-State (Transducers '91), pp.601-606, San Francisco, California, USA (1991.6) (Invited Keynote Paper) [PDF]
14) S. Tachi: Tele-existence - Toward Virtual Existence in Real and/or Virtual Worlds -, Proceedings of the International Conference on Artificial Reality and Tele-existence (ICAT '91), pp.85-94, Tokyo, Japan (1991.7) [PDF]
15) S. Tachi, H. Arai and T. Maeda: Tele-existence: An Advanced Remote Operation System with a Sensation of Presence, SMiRT 11 Transactions, pp.325-330, Tokyo, Japan (1991.8)
16) S. Tachi, H. Arai and T. Maeda: Measurement and Control in Tele-existence and Artificial Reality, Proceedings of the 12nd Triennial World Congress of the International Measurement Confederation (ACTA IMEKO 1991), pp.1241-1248 (1991.9) (Invited Keynote Paper)[PDF]
17) T. Maeda and S. Tachi: Development of Light-weight Binocular Head-mounted Displays, Proceedings of the Second International Symposium on Measurement and Control in Robotics (ISMCR '92), pp.281-288, Tsukuba, Japan (1992.11) [PDF]
18) Susumu Tachi and Ken-ichi Yasuda: Evaluation Experiments of a Telexistence Manipulation System, Presence, Vol.3, No.1, pp.35-44 (1994.2) [PDF]