TWISTER:
相互テレイグジスタンス可能な没入型全周囲裸眼3次元ブース
1. はじめに | 2. 概念、原理および研究開発 | 3.結論 | 引用文献 | 参考文献
TWISTER とは、回転型パララクスバリアという機構を設けることで水平360度の立体映像提示を裸眼のユーザに対して行う円筒ブース型のディスプレイである。

TWISTER (Telexistence Wide-angle Immersive STEReoscope) は、遠く離れた人が互いに同じ三次元空間に集う相互テレイグジスタンスと呼ばれるフェース・ツー・フェース・テレコミュニケションの概念を実現するために設計された没入型の全周囲フルカラーの裸眼3Dブースである。各々の円筒形のブースに入ったユーザーは、360度のフルカラーの全周囲の映像を、特殊な眼鏡などを装着しなくとも立体的に観察でき、かつそのユーザーの映像が任意の方向から立体的に撮像される。従って、複数のブースを用いれば、離れたところにいる人たちがすぐ近くにいるような感覚で集うことができる。この概念は、1996年に提唱され、この概念に基づいて、現在までにTWISTER I、II、III、IV、Vのプロトタイプが試作されている。TWISTER IVでは、左眼用と右眼用のLEDアレイとパララクスバリアからなり1.7rpsという高速で回転する36個の提示ユニットを用いて両眼ステレオ映像を提示する。また同時に、回転シリンダーに組み込まれたカメラからか、あるいは、シリンダーの外側に同心円状に設置されたレール上を移動するステレオカメラから、ブースのなかにいるユーザーの三次元像を取得する。このようにして2台のTWISTER内のユーザーは、互いのユーザーの3D映像を実時間で見ることができる。ここでは、相互テレイグジスタンスのためのTWISTERの概念と原理を説明し、現在までに開発されたプロトタイプシステムについて述べ、TWISTERの様々な応用を概観する。
1. はじめに
対面でのコミュニケーションは重要であり、個人の日常生活を構成する上で避けられないものである。 その意味で、人が離れているような状況においても、遠隔対面コミュニケーションシステムが有用になることが分かる。このようなシステムの最も重要な要素の一つが臨在感である。 没入感は、この臨在感の重要な要因の一つとなるので、このようなシステムの表示装置が没入型の立体映像を提供できることが望ましい。

図1 TWISTERを用いた遠隔対面コミュニケーション
一般的な従来の没入型装置には、HMD(ヘッドマウントディスプレイ)とCAVE(CAVE Automatic Virtual Environment)の2種類が挙げられる。 しかしながら、このような従来式装置においては、両眼立体視にHMDなどのヘッドギアやCAVE用シャッター眼鏡などが必要で、そのため、相手の顔、特に目の辺りが見えにくくなるため、視聴者に違和感を与えるだけでなく、表情などがわからず対面式コミュニケーションの妨げになってしまう。
裸眼3Dディスプレイは、ユーザーが特殊なヘッドギアやメガネを使わなくても三次元映像で見ることができるようにしてくれることから、対面式コミュニケーションには効果的である。 最も一般的な裸眼3Dディスプレイは、レンチキュラーレンズもしくはパララックスバリア方式を採用している。 このようなディスプレイの場合、視聴者が自分の頭の位置を特定の場所に持っていった場合、人は左右それぞれの目で異なる映像を知覚することになり、これが立体画像を浮かび上がらせる。 しかし、現存のレンチキュラーレンズもしくはパララックスバリア方式では、360度のパノラマの視界を提供できない。フライアイレンズを使った一体型撮像装置は、有望なテクノロジーであるが、 それでも、360度の一体型撮像自動立体3Dディスプレイで使用されたことはない。
従来のパララックスバリア方式、レンチキュラーレンズ、あるいはフライアイレンズには、別の欠点もある。それは、3D映像を見ている人の顔の撮影が困難なことである。この欠点は、裸眼3Dを提供するために、マイクロレンズやLCDで画面が密集し過ぎていて、それを見ている人の顔を撮影するカメラを配置する余裕がないことに起因する。目の高さにあるユーザーの顔をリアルタイムで録画することがアイコンタクトを含む対面式コミュニケーションシステムでは必須であるため、人間の目の高さにカメラを配置しなければならない。しかしながら、このようなセットアップをすると、マイクロレンズの配列をまばらにすることにつながり、これがディスプレイの性能に悪影響を及ぼすことになる。
これら上記の問題を解決するため、 TWISTER (Telexistence Wide-angle Immersive STEReoscope) を人対人の対面式通信システムのブースとして提唱する。移動式パララックスバリア方式を取り入れることにより、TWISTERは、特殊な眼鏡を何も使わずに視聴できるパノラマ立体画像を画面に表示することができる。さらに、このディスプレイユニットの間にカメラを配置することもできる。カメラを同時に回転することで、ブースが立体映像を表示してユーザーの映像を同時に捕らえることができるようになる。カメラをブースの外側に配置して相手を外側で見ることも可能である。ユーザー周辺の様々な視点からこれらの映像を確保すれば、イメージベーストレンダリング技術を使って任意視点から新しい場面を構築することができる。
ブースが複数あれば、遠隔地にいるユーザーがリアルタイムで共通のバーチャル環境にいるそれぞれ別のユーザーの作業する姿を3次元でみることができる。このような状況下では、ブースが現実の空間とバーチャル通信空間との媒体の役割を果たす。
以下、TWISTERの概念、原理、開発したプロトタイプ、応用の可能性について記述する。
1. はじめに | 2. 概念、原理および研究開発 | 3.結論 | 引用文献 | 参考文献
2. 概念、原理および研究開発
裸眼3次元パノラマ画面提示と全角度から人間のユーザーを撮影するリアルタイムカメラ装置の両方に利用できる、円筒形のブースを使った相互テレイグジスタンスは、1996年に提唱された[1]。 最初の手製の組み立て式実験装置では、入力装置と表示装置の機能を簡素にするために分けて作製し実験して、構想の実行可能性を実証した[1]。 この入力と表示2つの機能の実現法に関する基礎研究が行われ、その後、TWISTER Iと称された表示機能付きの最初の手製試作装置が2000年に作られ、2001年に論文発表された[2]。
JST(科学技術振興機構)のテレイグジスタンス通信装置に関するCRESTプロジェクトが、筆者を研究代表者として2000年11月に開始され、2003年3月に終了した[3, 4]。このプロジェクトにより、 TWISTERの概念を実際の機械とし実現し、その実現可能性と有効性を体験し実証できるようにした。
TWISTER IIは、WISTER Iを基準に作成されたもので、2001年に紹介された[5]。 TWISTER IIでは、世界初の全方向自動立体完全カラー表示の実現に成功した。これを、TWISTER IIIを使って、2002年のSIGGRAPHで世界中に発表し参加者の体験を通して実証した [6, 7]。 TWISTER IVは、表示機能と撮影のためのビデオ入力の両方を備えた装置である[8]。これは、2004年に開発された。 TWISTER Vと呼ばれる、ほぼ類似した装置が2005年に作成され、日本科学未来館(未来館)に設置された。 TWISTER IVを使っての通信実験は、東京大学で、TWISTER Vを使っての実験は未来館で行うことになっている。(注:その後、2009年に、TWISTER V は、慶應義塾大学メディアデザイン研究科に移設され、東京大学(本郷)と慶應義塾大学(日吉)との間で、相互テレイグジスタンスの実験に成功した(2011年3月9日))。
https://www.youtube.com/watch?v=jJhilulAFds
TWISTERを使った相互バーチャル環境におけるテレイグジスタンスの概念を図2に示す。 バーチャル環境のディスプレイに使用できる円筒壁を備えたブース内に各ユーザーが駐在し、このバーチャル環境内に互いに対面相手のユーザーを投射すると同時に互いのブース内部のユーザーの映像を3次元で取得する。このブースは連続的に比較的高速で回転する、(1)ペアのLEDアレイとパララックスバリア方式で構成された表示装置と(2)ビデオカメラとを有している。
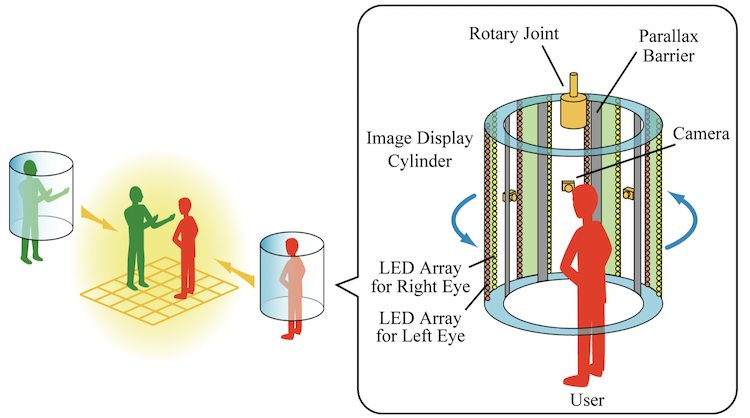
図2 TWISTERを用いる相互テレイグジスタンスの概念
ビデオカメラは、ユーザーを完全にカバーするような画角を有し、ブース内部にいるユーザーの周囲を巡回するので、実質的にすべての角度からユーザーを撮影できる。この方法を用いれば、ユーザーに属する立体情報が実質的にすべての角度から確保できる。 この装置を複数のユーザーが使う場合は、測定された各ユーザーの視線および相対位置が、別のユーザーの適切な映像を選択するのに使用される。選択されたほかの人の画像は、バーチャル環境内で適切に3次元に変換され、すべてのユーザーに表示される。
バーチャル透明盤(アルファプレーン)が、バーチャル環境に配置され、2カ所から撮影した画像(左と右)はアルファプレーンにマップされユーザーにより立体視される。 人の画像以外のビデオ映像の背景の部分は、マップされず透明なままとなり、共通空間がみえる。 このようにして、アルファプレーン上にテクスチャマップされた人の画像が、共通のバーチャル空間上に適切に配置され共通バーチャル空間内に図2ように適切に提示されるのである。
可動式パララックスバリアは、自動立体視 (autostereoscopy) を構築する重要な装置である。 図3に、開発された可動式パララックスバリアの原理を示した。 各表示装置は、2列のLEDアレイからなり、1列は、左目、もう1列は、右目用となる。 この装置は、約1.7の毎秒回転(rps)の速度で回転し、コントローラが、60フレーム毎秒(fps)の画面更新を行う。
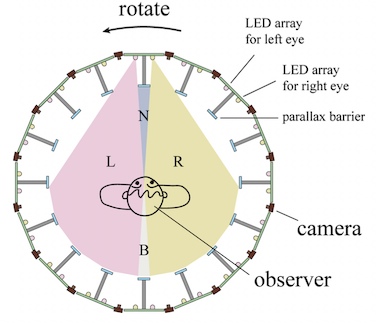
図3 可動(回転)式パララックスバリアの原理
2列のLEDアレイのみであれば、両目に両方の映像が見えてしまう。右目用の画像を右目に、左目用の画像を左目に分離して提示するためにパララックスバリアが設けられている。図に示すようにパララックスバリアが反対側のLEDを遮蔽するため、違う映像が左と右に表示される。 左目と右目の映像のみを、それぞれLとRの領域で見ることができる。 両方の画像が領域Bに映し出され、一方、領域Nには画像が何も出てこない。表示装置とバリアは一体になっており回転する。それがユーザーの周囲を回転した際、これらの領域が回転する様子は、図4に示す通りである。 図から明らかなように、立体視の条件は、表示装置がユーザーの周囲を回転しながら保持される。 立体表示が可能な画角は、ユーザーの方向と位置に依存する。 もし、視聴者の頭の位置が一カ所に固定されたとした場合でも、理想的な条件では140度超えている。 ユーザーが常に画像の注目画像領域中央に向くようにして首を回転すれば、画角は360度になる。
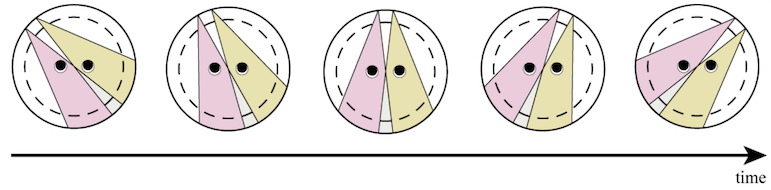
図4 両眼立体視の条件を満足させながらパララックスバリアが回転する
パララックスバリアによって、左目の画像と右目の画像間の相互干渉がほぼゼロである。このことが、他の立体視用映像形成装置に比べた長所になっている。 さらに、装置が毎秒600度の速度で回転するのに対し、人の目が追跡できるのは、およそ毎秒500度の回転速度のみであるため、このバリアが、ユーザーには見えない。つまり、これにより、連続したシームレスな360度のパノラマ立体視が実現できる。
TWISTERでは、2種類のモードを用いている。 モードⅠは、ユーザーの頭が向いている方向を追跡できる場合の提示法であり、先方の左目と右目から伝送された左右の画像を円筒形のビューにそれぞれ映し出す。 このモードでは、正確な精度の高い画像が提示可能である。
モードⅡは、頭の追跡を行わない場合の提示法である。同心モザイクによる提示を用いている。 このモードでは、ユーザーが向く方向とは無関係に、少なくとも前面からは正確な映像が提示される。 別方向からくる映像信号は近似である。 しかしながら、この提示法には、人の頭が向く方向を追跡する必要はなくなるというメリットがある。
図5と図6にTWISTERで表示されたパノラマ映像を示す。
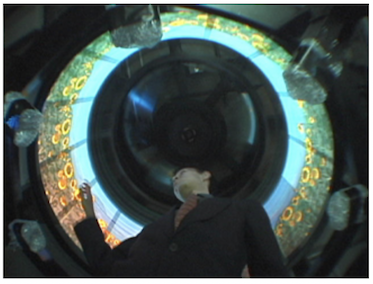
図5 TWISTER II に提示された360度の3次元パノラマ映像
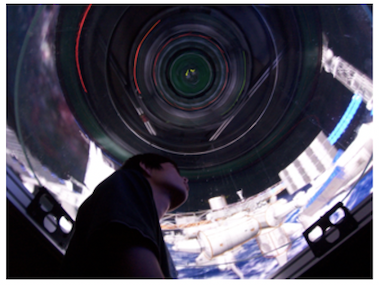
図6 TWISTER IV に提示された360度の3次元パノラマ映像
次に、ブース内の人の立体映像をリアルタイムに撮影する方法について述べる。一つ目の方法は、回転するLEDアレイの提示装置にカメラも取りつけ、同時に回転させ、それにより360度の任意の方向から撮像する方法である。すなわち、ブース内にいる人の立体ビデオ映像を36台の人の回りを回転するカメラで捉え、任意の角度から取った画像を該当するカメラが捕獲した情報から再加工する。 原理的には、カメラは1台でよいのであるが、それであると必要な回転速度が高速になりすぎるので、カメラの台数を増やして回転速度を実現可能なものにしている。図7に装置の概念図を示す。
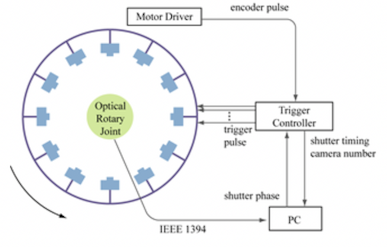
図7 撮影対象者の回りを周回するカメラによる対象者の撮像法のシステム図
TWISTER IVを使ってブース内部にある回転カメラを利用して、任意の方向から立体ビデオ映像を取得しユーザーの任意視点からの両眼視差画像の取得に成功した[8]。しかし、その結果、以下の要件のために、この方法の利用が実用的ではないことが明らかになった。
(1)高速大容量回転ジョイントが必要でありそれが高価であること
(2)一台のカメラで高速に回転させるには回転が高速になりすぎて実用的ではなくなる
(3)そのため多数のビデオカメラを利用すると、それらのビデオカメラの正確なアライメントと校正が必要になる
そこで、任意の方向から撮影する代替え手法を考案した。 図8および図9から明らかに分かるように、TWISTERの優れた特長の1つは、ブース内にいる人をブースの外から見ることができることである。 これは、扇風機の羽根が回っていても高速に回れば、それを通して奥の景色が見える現象と同じである。TWISTERも、外を暗くしておけば、中にいる人には、外の景色は見えずLEDアレイで提示される3次元世界のみが見える。一方、TWISTERの外からは、LEDアレイで照らされた中にいるユーザーが鮮明に見える。これは、つまり人間のユーザーの映像をブース外の方向から撮影できるということを意味する。
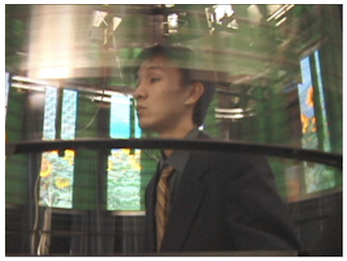
図8 TWISTER II ブースの外側から観察したユーザー

図9 TWISTER IVブースの外側から観察したユーザー
図10に、提唱する手法の概念図を示す。 ブースの外側に同心レールを配列し、この上に可動式立体カメラを設置する。 カメラは、撮影しなければならない人の方向に従いレール上でその位置を制御される。 立体カメラを複数用意すれば、複数の人間が中にいるユーザーを見る際にも利用することができる。 2台のカメラを交差する必要がある場合は、両方のカメラの役割を変えることでカメラを実際に交差せずに一つのカメラからもう一つのカメラに役割を移すことにより、実質上(バーチャルに)交差させられる。

図10 ブースの外側からブース内のユーザーの立体映像を取得する方法の概念図
図11に示した状況で利用法を考察する。 3台のTWISTERブースの内部にそれぞれ1名ずつ3名の人がいる。 各ブースには、2台の立体カメラが設置されている。 それぞれのバーチャル環境での位置関係に従って、それぞれが見える他のユーザーの映像を撮影して、それをバーチャル空間に提示する。そのような方法でTWISTERを利用すれば、ユーザーが遠く離れているにも関わらず、TWISTERブースを使ってバーチャル環境内で実質的に3名が一緒に会うことができる。
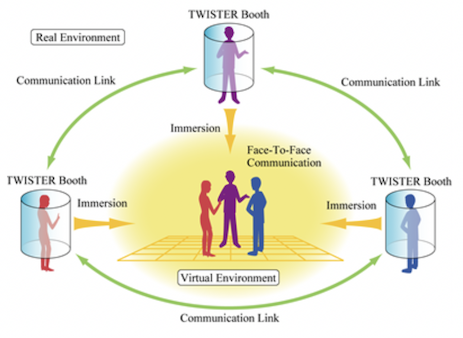
図11 TWISTERを使った共通バーチャル環境でのフェース・ツー・フェースのコミュニケーション
まず、各ブースに360度の3Dバーチャル環境が表示される。 次に、各ブースの2台の立体カメラがTWISTER内にいるユーザーの映像を、バーチャル環境内にいる3名のユーザーの相対位置と相対配向を基準に計算した角度から撮影する。
それから、撮影した画像が通信リンクを使って別のTWISTERに伝送される。 各ブースには、別のユーザーの人の画像が相対位置と相対配向に従いバーチャル環境内に配置される。 従って、ユーザーはバーチャル環境内にあたかも自分たちがすぐそばにいるという感覚になれる。
表1にTWISTER IIIとTWISTER IVの仕様を示す。 なお、TWISTER Vの仕様は、TWISTER IVの仕様と同じである。 表示装置上のLED配列を手直ししたのが、TWISTER Vであり、TWISTER Vは、TWISTER IVで使用していたディフューザを使わず
にLED表示が可能となったため映像がより鮮明になっている。
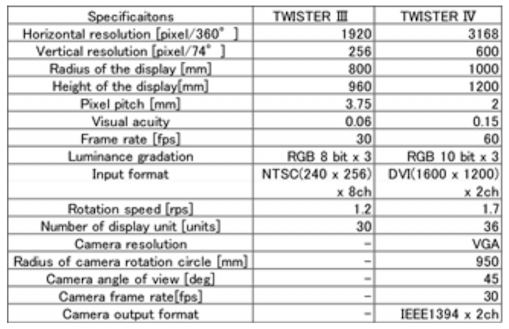
表1 TWISTER III とTWISTER IVの諸元
最後に、TWISTERを相互テレイグジスタンスロボットのコックピットとして利用する方法について述べる。ロボットを見ている人が、ネットワークを介してロボットにテレイグジスタンスしてきている人間が誰であり、どのような表情をしているかをリアルタイムに分かっている必要があるため、相互テレイグジスタンスは、ネットワーク方式で実現されるテレイグジスタンスにとって最も重要な技術の一つである。 図12に、相互テレイグジスタンス用のコックピットとしてTWISTERを使用する方法の概念を示す。
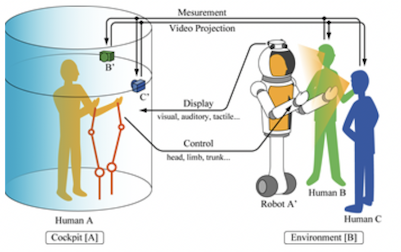
図12 TWISTERをコックピットして相互テレイグジスタンスを行う方法
ユーザーAは、代理ロボットA’に搭載された全方位立体カメラ[9]を使って、遠隔環境にいるBやCを、自分があたかも代理ロボットA’の中に入っているように感じながら見ることができる。Aには、TWISTERブース上で表示された遠隔環境のパノラマ立体映像が提供される。 A’は、テレイグジスタンスマスタスレーブ制御方法により制御される[3, 4]。
ブースの回りを周回するカメラB’およびC’は、人間BとCの代理ロボットA’に対する相対位置および相対方向により制御される。 BおよびCは、HMP(頭部搭載型プロジェクタ)を使ってA’に投射されたAを見ることができる。 A’は、再帰性反射材でカバーされている。この再帰性反射材に、再帰性投影用HMDを使って、二人の人が見る画像を多重に投射させる。そのような多重投影をしても、両方の画像がBとCが個別に視聴できるようになるのが再帰性投影技術の利点である。このRPT(Retroreflective Projection Technology: 再帰性反射技術)を使った相互テレイグジスタンス手法が利用され、それが有効であることが実証されている[10]。
図13にロボット上に投射された人の画像の例を示す。

図13 TELESAR II ロボットに投影されたユーザーの映像の例:左のユーザーの映像が右のようにロボット上にリアルタイムに投影される。
1. はじめに | 2. 概念、原理および研究開発 | 3.結論 | 引用文献 | 参考文献
3.結論
TWISTER(Telexistence Wide-angle Immersive STERoscope)は、特殊な眼鏡などを使用せず裸眼で、360度のフルカラーの立体映像をみることのできるVR視聴覚提示装置の概念を提唱し、その原理を明確にして、システムとして実現した。TWISTERは、立体映像ブースであるだけではなく、コンピュータコンソールとしてもりようできる。また、複数のブースをネットワークで結ぶことにより、臨場感通信ブースともなる。また、ロボットにテレイグジスタンスするためのコックピットとしても活用できる。このTWISTERブースは、通信、制御、創造、教育、エンタテイメント、解明等、3Cや3Eでの複数の用途に広範に利用されるであろう。
活用の一例として、ネットワークで結ばれたテレイグジスタンスの概念に基づく相互テレイグジスタンス技術により、互いに遠く離れていたとしても、ユーザーがあたかも同じ空間や時間を共有するかのごとく面談することを可能とする方法が提案され、それが実現可能であることを実際のシステムを構築して実験することで実証した。 電話から、スカイプ、そして、テレイグジスタンスビデオ通話への自然な流れを実現することが、相互テレイグジスタンスコミュニケーション開発のゴールである。
1. はじめに | 2. 概念、原理および研究開発 | 3.結論 | 引用文献 | 参考文献
引用文献
1) Susumu Tachi, Taro Maeda, Yasuyuki Yanagida, Masaaki Koyanagi and Hiroki Yokoyama: A Method of Mutual Tele-Existence in a Virtual Environment, Proceedings of The 6th International Conference on Artificial Reality and Tele-Existence, (ICAT'96), pp.9-18, Makuhari, Chiba, Japan (1996.11) [PDF]
2) Yutaka Kunita, Naoko Ogawa, Atsushi Sakuma, Masahiko Inami, Taro Maeda, and Susumu Tachi: Immersive Autostereoscopic Display for Mutual Telexistence: TWISTER I (Telexistence Widw-Angle Immersive STEReoscope Model I), Proceedings of IEEE Virtual Reality 2001, Yokohama, Japan, pp. 31-36 (2001.3) [PDF]
3) Susumu Tachi: Two Ways of Mutual Telexistence: TELESAR and TWISTER, in Telecommunication, Teleimmersion and Telexistence (S. Tachi ed.), pp. 3-24, IOS Press, ISBN 1-58603-338-7 (2003.3) [PDF]
4) Susumu Tachi: Telexistence: Next-Generation Networked Robotics, in Telecommunication, Teleimmersion and Telexistence II (S. Tachi ed.), pp. 3-38, IOS Press, ISBN 1-58603-519-3 (2005.3) [PDF]
5) Kenji Tanaka, Junya Hayashi, Masahiko Inami and Susumu Tachi: The Design and Development of TWISTER II: Immersive Full-color Autostereoscopic Display, Proceedings of the ICAT2001 (11th International Conference on Artificial Reality and Telexistence), Tokyo, Japan, pp. 56-63 (2001.12) [PDF]
6) Kenji Tanaka, Junya Hayashi, Masahiko Inami, Yutaka Kunita, Taro Maeda and Susumu Tachi : TWISTER: A Media Booth, Emerging Technologies, SIGGRAPH 2002, San Antonio, USA (2002.7) [PDF]
http://www.siggraph.org/s2002/conference/etech/twister.html
7) Kenji Tanaka, Junya Hayashi, Masahiko Inami and Susumu Tachi: TWISTER: An Immersive Autostereoscopic Display, Proceedings of IEEE Virtual Reality 2004, Chicago, USA (2004.3) [PDF]
8) Junya Hayashi, Kenji Tanaka, Masahiko Inami, Dairoku Sekiguchi,Naoki Kawakami and Susumu Tachi: Issues in image-capture system for TWISTER, Proceedings of the ICAT2002(12th International Conference on Artificial Reality and Tele-Existence), Tokyo, Japan, pp. 44-51 (2002.12) [PDF]
9) Kenji Tanaka and Susumu Tachi: TORNADO: Omnistereo Video Imaging with Rotating Optics, IEEE Transactions on Visualization and Computer Graphics, Vol. 11, No. 6, pp. 614-625 (2005.11) [PDF]
10) Susumu Tachi, Naoki Kawakami, Masahiko Inami and Yoshitaka Zaitsu: Mutual Telexistence System Using Retro-reflective Projection Technology, International Journal of Humanoid Robotics, Vol. 1, No. 1, pp. 45-64 (2004.3) [PDF]
1. はじめに | 2. 概念、原理および研究開発 | 3.結論 | 引用文献 | 参考文献
参考文献
Susumu Tachi: Augmented Telexistence, in Y.Ohta and H.Tamura ed, Mixed Reality - Merging Real and Virtual Worlds, Springer-Verlag, ISBN3-540-65623-5, pp. 251-260 (1999.3)
國田 豊, 稲見 昌彦, 前田 太郎, 舘 暲: 多眼カメラを用いた任意視点人物像の実時間生成システム, 電子情報通信学会論文誌, Vol.J84-D-II, No.1, pp.129-138 (2001.1)
國田 豊, 尾川 順子, 佐久間 敦志, 稲見 昌彦, 前田 太郎, 舘 暲: 没入形裸眼立体ディスプレイTWISTER Iの設計と試作, 映像情報メディア学会論文誌, Vol.55, No.5, pp.671-677 (2001.5)
田中 健司, 林 淳哉, 川渕 一郎, 稲見 昌彦, 舘 暲: 裸眼全周囲ステレオビデオディスプレイ TWISTER III, 映像情報メディア学会誌, Vol.58, No.6, pp.819-826 (2004.6)
Ryusuke Hayashi, Taro Maeda, Shinsuke Shimojo and Susumu Tachi: An integrative model of binocular vision: a stereo model utilizing interocularly unpaired points produces both depth and binocular rivalry, Vision Research, Volume 44, Issue 20, pp. 2367-2380 (2004. 9)
Kenji Tanaka and Susumu Tachi: TORNADO: Omnistereo Video Imaging with Rotating Optics, IEEE Transactions on Visualization and Computer Graphics, Vol.11, No.6, pp.614-625 (2005.11)
林 淳哉, 圓道 知博, 川上 直樹, 舘 暲: LEDの小型化と光信号の利用による没入型裸眼立体ディスプレイの高品位化, 映像情報メディア学会誌, Vol.60, No.6, pp.951-957 (2006.4)
内田 貴之, 渡邊 淳司, 川上 直樹, 舘 暲: 走査型ディスプレイにおいて生じる形態歪みの特性, 映像情報メディア学会誌, Vol.60, No.9, pp.1496-1499 (2006.9)
加藤 伸明, 城 堅誠, 南澤 孝太, 新居 英明, 川上 直樹, 舘 暲: 放射状カメラによる実時間全周囲立体映像撮像システム, 日本バーチャルリアリティー学会論文誌, Vol. 13, No. 3, pp. 353-362 (2008.9)
城 堅誠, 南澤 孝太, 新居 英明, 川上 直樹, 舘 暲: GPU を用いた全周囲立体 CG 映像の実時間生成, 日本バーチャルリアリティー学会論文誌, Vol. 13, No. 3, pp. 343-352 (2008.9)
渡邊孝一, 南澤孝太, 新居英明, 舘暲: 全周囲裸眼立体ディスプレイを用いたサイバースペースへのテレイグジスタンス,日本バーチャルリアリティ学会論文誌, Vol.17, No.2, pp91-100, (2012.6)