- keyword
- Telexistence/VR/AR
- Autosteroscopy/RPT
- Haptics/Perception
- Guide Dog Robot/Prostheses
- Bispectrum/Signal Processing

Telexistence/VR/AR
TELESAR VI: Telexistence Surrogate Anthropomorphic Robot VI
TELESAR VI is an avatar robot system developed as an embodied telexistence platform in the Embodied Media Project. As a self-incarnation (avatar), it enables a person to perform various actions ranging from watching and listening to speaking, from a remote location, as if he/she were physically present.

Telexistence/VR/AR
Telexistence Avatar Robot System: TELESAR V
"TELESAR V" is a haptic telexistence system which enables a user to bind with a dexterous robot and experience what the robot feels from its fingertip when manipulating and touching objects remotely.
The user is able to see the remote environment and the robot hands as if he were inside the robot and hear what the robot hears in the remote location through a Head Mounted Display. With human-like movements of the upper body, arms and hands of TELESAR V, together with the ability to see, hear and feel haptic sensation simultaneously, the user experiences the out-of-body illusion when he observes himself using this system.

Telexistence/VR/AR
Telexistence to the real world (Telesar IV)
The mobile mutual telexistence system, TELESAR IV, which is equipped with master-slave manipulation capability and an immersive omnidirectional autostereoscopic 3D display with a 360◦ field of view know as TWISTER, was developed in 2010. It has a projection of the remote participant’s image on the robot by RPT. Face-to-face communication was also confirmed, as local participants at the event were able to see the remote participant’s face and expressions in real time. It was further confirmed that the system allowed the remote participant to not only move freely about the venue by means of the surrogate robot, but also perform some manipulation tasks such as a handshake and several gestures.

Telexistence/VR/AR
TELUBee: TELexistence platform for UBiquitous Embodied Experience
Movie: http://www.youtube.com/watch?v=Q5zigZDKZo8

Telexistence/VR/AR
Mutual Telexistence Robot: TELESAR II
TELESAR II is a mutual telexistence system, which can generate the effect of existing in a remote place in local space by the combined use of an alter-ego robot and RPT. A person in front of the robot sees the full face of the operator, while another person seeing the robot from its side sees the facial profile of the operator in real time.

Telexistence/VR/AR
Telexistence Robot "Telesar"
Telexistence is fundamentally a concept named for the general technology that enables a human being to have a real-time sensation of being at a place other than where he or she actually exists, and being able to interact with the remote environment, which may be real, virtual, or a combination of...

Telexistence/VR/AR
TORSO
We have developed the neck and torso of an allin-one robot that not only has three rotational DOF of the neck but also has two rotational DOF and one translational DOF of the waist. This robot is called “TORSO”.
The motion of looking around an object is one of the m...

Telexistence/VR/AR
Autosteroscopy/RPT
TWISTER
TWISTER (Telexistence Wide-angle Immersive STEReoscope) is an immersive full-color autostereoscopic display, designed for a face-to-face telecommunication system called “mutual telexistence”, where people in distant locations can communicate as if they were in the same virtual three dimensional s...
Telexistence/VR/AR
Autosteroscopy/RPT
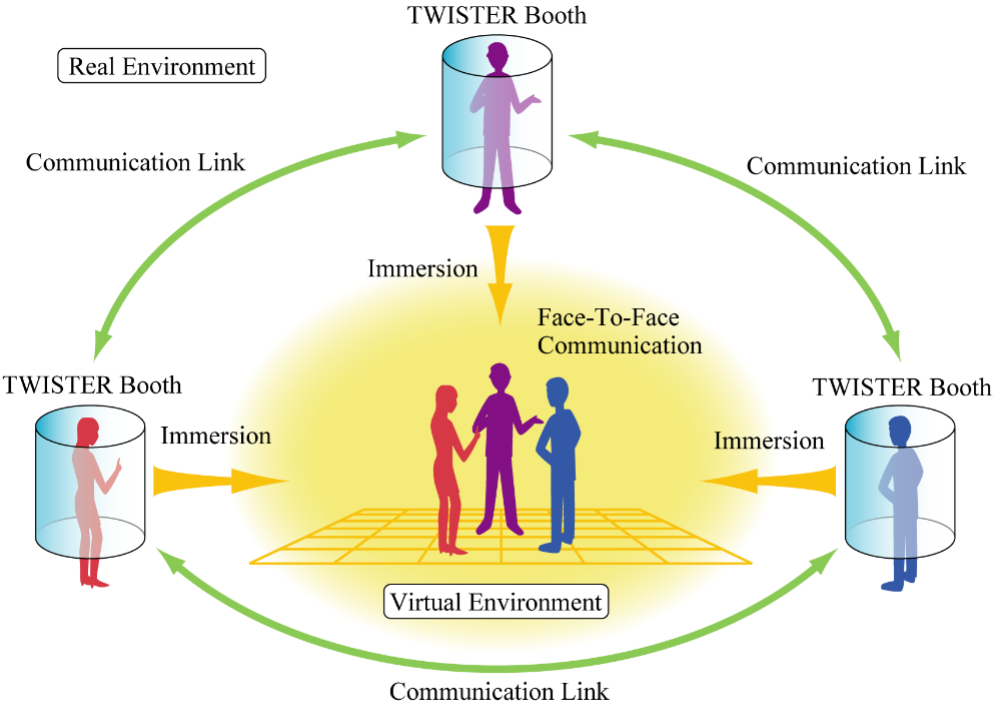
Face-to-Face Telexistence Communication in Metaverse using TWISTER Booths
TWISTER has been implemented for face-to-face communication in virtual space (metaverse). As is shown in the figure, although the human users are in remote locations, they can meet in a virtual environment (metaverse) as if they meet in person using TWISTER booths.
Telexistence/VR/AR
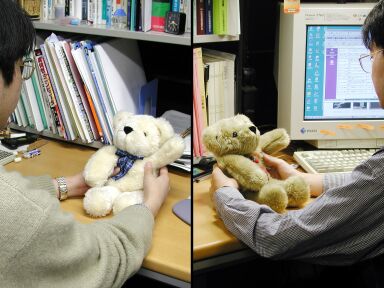
Robot Phone
RobotPHONE is an RUI system for interpersonal exchange that uses robots as shape sharing agents for physical communication. The shape and motion of remote shape-sharing devices are always synchronized by a symmetric bilateral control method. Operations to the robot, such as the modification of po...

Telexistence/VR/AR
RCML
R-Cubed (R3: Real-time Remote Robotics) is the concept which enables human beings to exist anywhere in the world by controlling remote robots in real time through the network. So far there exists a standardized method to describe and access virtual worlds by using Virtual Reality Modeling Languag...

Autosteroscopy/RPT
Retro-reflective Projection Technology, Optical Camouflage
RPT : Retro-reflective Projection Technology is a method for augmented reality that unites the virtual world and the real world.

Autosteroscopy/RPT
Transparent Cockpit
For safety and operability, it is very important to obtain a wide field of vision while operating a vehicle. However, the space to set up windows is limited. Therefore, we propose a “transparent cockpit,”in which the image of a blind spot is displayed on the inner wall of the vehicle using retro-...
Autosteroscopy/RPT
MEDIA series
In this project we propose the concept of "Object Oriented Display", which enables an operator to perceive and to operate the virtual object as if it is real object. And in this project we also describes design and implementation of three types of object oriented display.

Autosteroscopy/RPT
Haptics/Perception
HaptoMIRAGE
HaptoMIRAGE is a multi-usered wide-angle aerial autostereoscopic display for Mixed reality. Seemless interaction with real and virtual spaces such as aerial 3D skeching and commucation with 3DCG characters in real environment can be achived.

Autosteroscopy/RPT
RePro3D
RePro3D is a full-parallax 3D display system suitable for interactive 3D applications. The approach is based on a retro-reflective projection technology in which several images from a projector array are displayed on a retro-reflective screen. When viewers look at the screen through a half mirror...

Autosteroscopy/RPT
Twinkle
Twinkle is a novel interface for interaction with an arbitarary physical surface using handheld projectors. It determines the features of the physical environment and displays images and sounds that are generated according to these features.

Autosteroscopy/RPT
Spinning-disc 3D Television
We have incorporated a novel LED-projection technology into the simple structure of a spinning-disc television. In order to display a 3D image, we have replaced the conventionally used light bulbs with an LED array. With the aid of this technology, users can view different images from different v...

Telexistence/VR/AR
Autosteroscopy/RPT
Seelinder
Cylindrical 3D display visible from any angle
This cylinder-shaped display reconstructs light rays from an object, and the image is visible from 360 degree.
The display has the following features:
(1) 3D gl...
Autosteroscopy/RPT
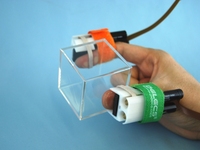
GelForce
GelForce is a novel type of interface that measures the distribution of both the magnitude and direction of force. The sensor is composed of a transparent elastic body, two layers of blue and red markers and a CCD camera. Force vectors are calculated from the captured movement of the markers. Fro...
Telexistence/VR/AR
Autosteroscopy/RPT
Haptics/Perception
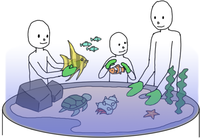
Intelligent and tangible virtual environment
The scope of this project is to construct an intelligent and tangible virtual environment, in which real-time communication, human interface, and media processing are firmly-fused. Our focus is establishment of the fundamental methodologies of measurement, transmission, and presentation of real-w...

Haptics/Perception
TECHTILE toolkit
TECHTILE = TECHnology based tacTILE design
Project detail
- http://www.techtile.org/en/
Haptics/Perception
GravityGrabber
"Gravity Grabber" provides a new form of ubiquitous haptic interaction that delivers weight sensations of virtual objects. Gravity Grabber is derived from the novel insight that fingerpad deformation provides a reliable sensation of weight even when proprioceptive sensation is absent.
...

Haptics/Perception
GhostGlove
"GhostGlove" delivers haptic sensations to the entire hand; each finger and the palm, it integrates the haptic sensations with visual sensations so as to enable a recognition of the realistic existence of the virtual world.

Haptics/Perception
Pen de Touch
"Pen de Touch" is a pen-shaped handheld haptic display that allows haptic interactions with virtual environments by generating kinesthetic sensations on the user’s fingers; the user’s movements are not restricted since the device does not have mechanical linkages. Unlike conventional haptic displ...

Haptics/Perception
Pen de Draw
"Pen de Draw" is a 3D modeling system that enables a user to create touchable 3D images as though he/she is drawing images in mid-air. The ungrounded pen-shaped kinesthetic display "Pen de Touch" is used as an interface. The user can create 3D shapes by drawing figures on the virtual canvas and t...


Haptics/Perception
Affective Haptics
Driven by the motivation to enhance emotionally immersive experience of communication in Second Life, we propose a conceptually novel approach to reinforcing own feelings and reproducing the communicating partner’s emotions through affective garment. The emotions detected from text are stimulated...

Haptics/Perception
ARScope
ARScope is a novel interface for various applications of augmented reality. A superimposed image is projected by a head-mounted projector onto a hand-held device covered with retro-reflective material. The background image is transformed into an image that is suitable for the user's current viewp...

Haptics/Perception
ARForce
ARForce is a novel force vector sensor for various applications of augmented reality. ARForce enables users to measure the 3D position of markers as well as also the distribution of force vectors that are applied by a user. Using this system, users can manipulate virtual objects using various fin...

Haptics/Perception
Colorful Touch Palette
“Colorful Touch Palette” is a novel interactive painting interface that provides us a rich tactile sensation. Users can select various tactile textures, paint the textures on the canvas, and experience the tactile sensation of paints with the electrotactile stimulation. The interface could be use...
Haptics/Perception
Pop Up!
Pop Up! is an innovative approach to display 3D objects by orchestrating the vertical motion of a dense array of pin-rods. The effect is similar to a children's "Pop up book", where a flat surface transforms into a 3D form. Each pixel is composed of a simple component, and the driving method is s...

Haptics/Perception
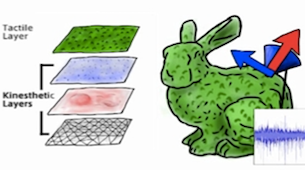
Haptic Video
The instruction of professional skills is typically performed with conventional educational materials like video, demonstrating the operations of an expert.
There is a multitude of means for knowledge transmission in academic training, but there are relatively few me...
Haptics/Perception
Guide Dog Robot/Prostheses
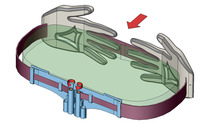
SmartFinger
The “SmartFinger” is a new type of tactile display for AR which is worn on the nail side of the finger. It does not inhibit our tactile sensation, since the ball of the finger is naked and we can feel the environment directly. The absence of any material between the object and the finger is a cri...

Haptics/Perception
SmartTouch
SmartTouch is a new haptic AR system, based on electrical stimulation to convert sensed information into skin sensation. It is composed of a thin electro-tactile display and a sensor mounted on skin, so the wearer can not only make physical contact with objects, but also touch surface information...
Autosteroscopy/RPT
Haptics/Perception
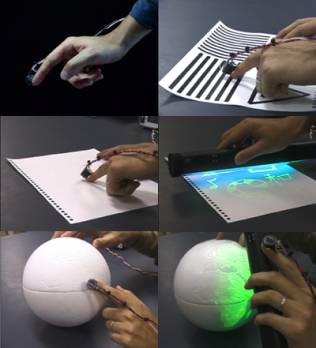
SmartTools
"SmartTool" is a system for the Augmented Reality of Haptics, which is composed of a sensor and a haptic display.
This system could enhance human haptic sensation. For example, this system can enlarge the roughness of the surface by measuring it. In other case, this...

Haptics/Perception
AED
"AED" is a kind of haptic display for virtual reality. The conventional haptic display generates force to display haptic sensation. However, this system displays haptic sensation by imitating the shape of the object. The user could get haptic sensation by touching the imitated surface of the obje...

Haptics/Perception
Guide Dog Robot/Prostheses
Forehead Retina System
See below...
eyeplusplus Inc.
- http://www.eyeplus2.com/
