VR元年であるといわれた2016年からVRの第二次ブームの兆しがみえ、ゴールドマンサックスなどが2020年代にVRがテレビに匹敵する産業になると予測したが、その流れの中で、いままさにVRの第二次興隆期に入ってきている。
2016年に遡ること4年前の2012年に、東京大学名誉教授の
舘 暲: 原点回帰‐バーチャルリアリティとテレイグジスタンスの将来を見据えて‐,日本バーチャルリアリティ学会誌,Vol. 17, No. 4, pp.6-17 (2012.12) [PDF]
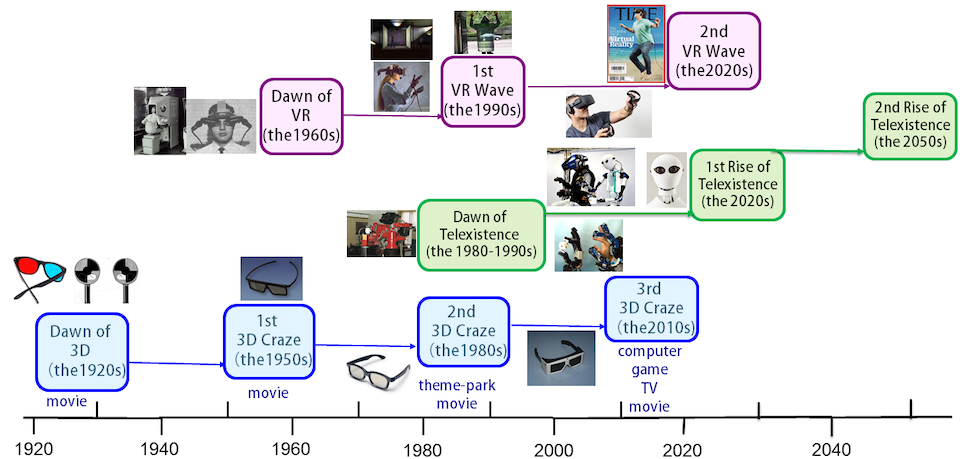
3DとVRという二つの科学技術は大きな関係性を持っています.3Dの歴史を遡って昔から見ていきますと,30年毎に3Dのブームというものが起きていることが分かります.そして,その3Dのブームの後に,VRがブームとして出てくるというような流れがあることも分かります.歴史を紐解くと,3Dの最初の登場は19世紀ですが,3Dが黎明期を迎えるのは1920年代を待たねばなりませんでした.黎明期を経て,最初に3Dのブームが訪れるのが1950年代で,3Dという名称もこのときから定着しました.爾来,1980年代に第2次3Dブーム,そして2010年代に第3次3Dブームという流れになります.最初の3Dブームの10年後の1960年代にVRの黎明期,第2次3Dブームの10年後の1990年代に最初のVRブーム,ということから,3Dブームのほぼ10年後にVRのブームが生まれるということが見えてきます.このことから,次の第2次VRブームは2020年代だと予想されるわけであります(舘予想).
その2012年に行った予想のとおり、現在、第二次のVRの興隆期を迎えつつある。そして、また新たな次の潮流がみえてきている。それが、テレイグジスタンス(アバター)という潮流である。
テレイグジスタンスは、舘 暲が1980年9月19日に着想した概念であり、1982年には最初の装置が作製され発表された。その後、40年近い歳月を経て技術が育ちテレイグジスタンスが最初の興隆期を迎えようとしている。すなわち、現在の2020年代、世界的には、AVATAR XPRIZE、国内的には、ムーンショットの第一目標にとりあげられ、アバター(テレイグジスタンス)を目指す多くのスタートアップが生まれ、既存の大企業も取り組み始めるなど、まさに世の中の進歩が、テレイグジスタンスに向かって動き出しているといえる。
舘の予想は下記の展望論文に記載されている。
舘 暲:テレイグジスタンスと時空間瞬間移動産業、自動車技術、vol.37, no.12, pp.17-23 (2019.12) [PDF]
その中で、舘はテレイグジスタンス(アバター)は、2020年代に第一次の興隆期を迎え、その後2050年には、第二次の興隆期が再び訪れ、その時には、テレイグジスタンスが社会に浸透し定着するとの予想を行っている。下記に、その予想の部分を掲載する。
図8に3D,VR,テレイグジスタンスに関する30年周期を俯瞰している.黎明期とは,関係者は知ってはいるものの一般的には知られておらず,興隆期を迎え,歴史を紐解いたときの原点の時代であり,興隆期を2度ほど迎えて,世の中に浸透してゆくように思われる.
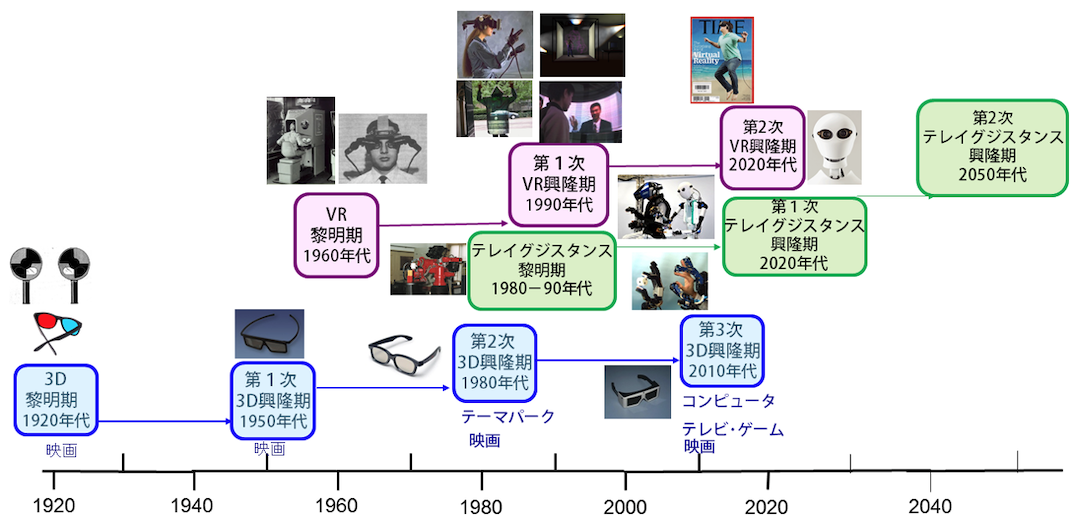
図8 3D・VR・テレイグジスタンスの興隆の歴史と将来予想
1980年代から2000年代までの30年間は,テレイグジスタンスの黎明期といえよう.学界では認知されプロジェクト研究などが進んだ一方,社会に実装されブームを起こすまでには至っていない.
現在,世の中の進歩が,まさにテレイグジスタンスに向かつて動き出しているといえる.2020年代は,環境,距離,年齢,身体能力など,さまざまな制限にかかわらず自在に瞬時に移動することを可能とする本技術により,時空間瞬間移動産業が生まれ育ち,遠隔就労やレジャーはもとより,例えば医師,教員,熟練技術者が不足している地域や,人間の立ち入りが困難な災害現場等でのアバターの活用等を通じて社会課題の解決と経済発展の両立への貢献が期待される.さらに,30年周期予想から,2050年代に,再び大きなステップアップが生じて,社会が大きく変わるものと予想される.(舘予想2)
以下に、これら予想の原点ともいえる、2012年の基調講演〔舘 暲: 原点回帰‐バーチャルリアリティとテレイグジスタンスの将来を見据えて‐,日本バーチャルリアリティ学会誌,Vol. 17, No. 4, pp.6-17 (2012.12) [PDF] 〕の内容をWEB版として掲載する。
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
原点回帰
VR学会の今回の大会テーマが「原点回帰」ですので,Virtual Reality(以下VR)の過去から現在,そして未来について俯瞰できればと思い,“バーチャルリアリティとテレイグジスタンスの将来を見据えて”と題しまして,お話しさせていただきたいと思います.いろいろと昔話も交えながら,どのようにしてテレイグジスタンスが生まれたか,というようなことも少しお話しさせていただければと思います.
3Dは30年周期
3DとVRという二つの科学技術は大きな関係性を持っています.3Dの歴史を遡って昔から見ていきますと,30年毎に3Dのブームというものが起きていることが分かります.そして,その3Dのブームの後に,VRがブームとして出てくるというような流れがあることも分かります.歴史を紐解くと,3Dの最初の登場は19世紀ですが,3Dが黎明期を迎えるのは1920年代を待たねばなりませんでした.黎明期を経て,最初に3Dのブームが訪れるのが1950年代で,3Dという名称もこのときから定着しました.爾来,1980年代に第2次3Dブーム,そして2010年代に第3次3Dブームという流れになります.最初の3Dブームの10年後の1960年代にVRの黎明期,第2次3Dブームの10年後の1990年代に最初のVRブーム,ということから,3Dブームのほぼ10年後にVRのブームが生まれるということが見えてきます.このことから,次の第2次VRブームは2020年代だと予想されるわけであります(舘予想).
3Dの原点
そもそもの3Dですが,これは1838年のことですので,まだ日本では江戸時代ですね.江戸時代の末頃に,イギリスでBinocular Stereo 隔離式が生まれます.これは計測関係ではWheatstone Bridgeの業績で非常に有名なSir Charles Wheatstoneが考えだし,王立協会に立体鏡として発表したBinocular Stereoが最初のStereo Viewerであります.そしてSir David Brewsterという有名なスコットランドの物理の教授が,1849年にBinocular Stereoの鏡をプリズムに変更し,それをOliver Wendell Holmesがアメリカで実用的な製品に変えたということであります.しかしStereoといっても, まだ絵や写真を見せる程度という段階でありました.
3D前夜
それが,1853年になりまして,アナグリフ式(anaglyph)という,左目と右目に色の違う赤と青のフィルタを付けて,赤と青で描いた視差のある画像を,それぞれの目に見せることで,3次元の映像を生成する方式が生まれたわけです.また赤・青よりも赤・緑のほうが人間の生態構造とマッチしやすい為,フィルタが赤・緑になり,1858年,日本ではまだ江戸時代でありますけども,ドイツでは,マジックランタンのスライドショーというものが生まれてきたわけであります.これは立体映像ではありますが,動くことはありませんでした.動くようになった,つまり最初の映画は,1895年に発明のシネマトグラフ・リュミエールとされています.実際にはエジソンが1891年にKinetoscopeという映画を作っていますが,その時のエジソンの映画というのは,まだ覗きメガネ方式でした.そのエジソンに触発されたLumierel 兄弟が,覗きメガネではなくて,それをスクリーンに投影して複数の人が同時に見られるようにしたものが,シネマトグラフ・リュミエールです.シネマトグラフ・リュミエールは3Dではありませんが,アナグリフと組み合わされ1920年代の3Dの黎明期につながって行きます.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
3Dの黎明期
1920年になって実用的な3Dの発明が生まれてきます.1920年代,アナグリフ方式で3Dの映画が生まれます.しかし,赤や緑の色ではなく普通の色で立体に見えるようにしたいという要望も強いものでした.これに応えたのが,時分割方式の3D映画です.Hammond Organで有名なLawrence Hammondという人が,機械式のシャッターで右目・左目を高速に切り替えることで立体を創り出しました.円盤型のシャッターが回転することで,右目・左目に入る光が切り替わります.さらに映写機の方も同じ様に,円盤のシャッターに同期させて,右目・左目様の映像に切り替えることで左右違う映像を投影し立体に見せるシステムになります.これは非常に上手く出来た3Dです.これには,多くの人が驚愕したのですが,あまりにも経済的に効率が良くないということで,残念なことにすぐに廃れてしまいました.
最初の3Dブーム
1950年代になりましてポラロイド方式,つまり偏光方式が一般的に使われる様になりました.偏光ステレオ映画(Polarized Stereoscopic Pictures )自身は 1936年 のEdwin H. Land が最初ですが,これが一般的になり,いわゆる3Dブーム(3-D movie craze)が起きたのは, 1952 年から 1955年です.偏光方式は直線偏光でした.また,3Dという名前が生まれたのも,この時だと言われています.技術的には,偏向ステレオメガネに加え,偏向保存シルバースクリーンができて,3D技術が生まれることが可能になったわけであります.
大体3Dブームというものは,短い期間で終わってしまいます.非常にブームになりますが,2年から3年くらいでそのブームは去ります.しかし,ブームは去っても,その度に,それに伴う技術は発展していきます.
VRの黎明期
10年後の1960年代になりまして,Ivan Edward Sutherlandが,3次元の映像をコンピュータグラフィックス(CG)で創り出しました.実世界にコンピュータグラフィックスの映像をVRで─まだVRと言う言葉はないのですけれども─表して,さらに人間の動きに合わせて,映像が視線方向に合わせて見える3Dを実現したのです.それは,1968年のA Head-Mounted Three Dimensional Displayという論文として発表されました. 1838年のWheatstoneの立体鏡からSutherlandのHMDまで130年の時が経っております.映像自体はまだ線画ではあるものの,コンピュータグラフィックスで表された映像であり,首の運動に連動して人間の視線方向に対応した方向からの物体が見えるため ─繰り返しますが,まだこの時にはVRという言葉はありません─ これがVRの最初だと言われています.SutherlandがCG の父であるとともに,VRの父とも言われる所以です.
第2次3Dブーム
1950年代から30年経った1980年代になりまして,第2次の3Dのブームが生まれます.その際使われたのが,直線偏光ではなく,首を傾けても3次元が見える円偏向方式であります.非常に楽に見られるということで,映画とか万博等のイベント等で使われました.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
最初のVRブーム
それから,10年後の1990年代になりまして最初のVRブームが起こります.ことの起こりは, VPL がNASAと共同で開発した有名なEyephoneというシステムであります.Sutherlandから約20年の時を経て1989年に生まれてきました.Sutherlandは自分で首を動かせる様にしてはいますが,あたかも自分がコンピュータの生成した別の場所に居るかのような感覚にはなっていません.SutherlandのHead-Mounted Three Dimensional Displayは,今の言葉でいうとAugmented Reality(AR)の環境ですのでsee-throughで現実世界が見えていて, あくまでも今自分がいる現実世界にコンピュータで生成した人工物が加わったという状況です.そういう意味では,VRとしてはまだ足りないわけです.それに対してVPL Eyephoneは,データグローブという装置と相俟って,VR世界に自己が投射されます.つまり,VR世界における自分の手というものが見えて,その世界に没入しているという感覚が生まれるのであります.
このVPLの1989年のシステムに至り,VRの3要素である「3次元の空間性」「実時間の相互作用性」「自己投射性」が実現できたことになります.一方,私たちのテレイグジスタンスにおいては,この3要素をもったシステムを,CG環境と実空間における自分の手による操作を含め,1988年に完成しています.
それとは別に,1990年代にもう一つ有用な3要素を有したシステムである CAVE(CAVE Automatic Virtual Environment)というものが完成しています.これはCarolina Cruz-NeiraとThomas A. DeFantiとDaniel Sandinの3人が1992年にSIGGRAPHで展示発表したもので,部屋自体を3次元のインタラクティブな環境にするという研究でした.その後,日本では,東京大学の廣瀬先生を中心にCABINというものが作られた訳であります.CAVEは3次元を見る時に,映像をシャッターメガネで切り替えています.これは1922年から70年の年月を経て,Hammondの機械式シャッターが液晶シャッターに変わったものであるということが分かります.シャッターを液晶で電子式にすることによって,従来の機械式に比べ使いやすくなり実用化されました.現在の3Dテレビにも液晶シャッターの方式が使われています.
1980年代にVRの源流が各分野で進展
第2次3Dブームが起きた1980年代にVRの源流が各分野で生まれました.例えば,Scott Fisher等はバーチャルディスプレイ・バーチャルコンソールということで進展させました.コンピュータグラフィックスの分野では『コンピュータグラフィックス→3DCG→実時間3DCG→実時間インタラクティブ3DCG』というSutherlandの唱えた流れになります.またCADなどを3DにしていくというのがFrederick Brooks, Jr.の考えになりますし,またアートの分野でもMyron Kruegerなどがインタラクティブなアートをresponsive environmentと称しました.コンピュータシミュレーションの分野でも,実際の飛行機の操作と同じような感覚で操縦できるフライトシミュレータを更に進展させたスーパーコックピットをThomas Furnessなどが中心になって提唱しました.電話・テレビ電話という臨場感通信会議,あるいはテレオペレーションといった人間がその場に居るような臨場感を持ったテレイグジスタンス,テレプレゼンスといったものが,1980年代にすべて生まれ,そして育っていったわけであります.
そんなとき,1990年に,サンタバーバラ会議が行われます.MITの関連のEngineering Foundationからの手紙が来る訳です.今の様にメールで届く訳ではなく,普通の郵便で,エアーメールで届いたわけですけども,VRの研究をしている人を集めて,研究会を開催するので是非来てほしい,という招待状がきました.そしてサンタバーバラに,様々な分野の人々が集まって,研究を発表し合い,ブレインストーミングして議論し合ったというわけであります.分野は違うけれども,共通した要素がある.全く違うような分野で,様々に発展しているが,どれも非常に共通したものを持っている.それは何かというと「3次元」というものを求めている.しかも,その3次元は人間の動きに応じて「変化する」「反応する」「変わっていく」インタラクティブな3次元である.それと同時に,自分自身がそこに存在し,自分と環境とがシームレスに結ばれているという感覚を求めている,というわけであります.そういう観点で見ると,一見それぞれの分野で違う研究であるように見えるけれども,実際には,それらは同じものを要素として追求しており,一つの分野で出現した技術というものは,他の分野でも応用しうるものであるということが明確となってきました.そして,その追求しているものは,学問領域としましても,一つの統一した学問分野として成立するということがわかったわけであります.さらに,その会議でPresence(MITからの学術雑誌)も出版することが決まったのです.そういうことの中で,こういう分野をVR(Virtual Reality)と呼ぶことによって,この分野を進展させていくということに繋がるとの共通認識が生まれました.1990年のサンタバーバラ会議が,そういう意味で,VRのビッグバン「最初の時」であるということが言えます.つまり,1990年のこの会議が VRという学問分野の出発点であります.
Virtualとは
Virtualというのは,これまでにも何度かお話しさせていただいていますが,決して仮想ではなく,むしろ現実です.もちろん現実そのものではないけれども,現実の本質や効果を持ったものであり,現実のエッセンスです.エッセンスは物事の本質であり,一方,本質は絶対的なものではなく,目的により体現すべきエッセンスが変わると言うことになります.目的によってどの部分を再現すれば,現実を知る人間にとって感じる効果が同じになるか,と言うところに焦点を置く必要があります.どちらにしても,Virtualは人間にとって現実と同じ効果をもたらしたり,同じ感覚をもたらしたりするもの,というわけであります.
VRの3要素
VRの3要素の一番目として,現実空間の距離と大きさが保たれた3次元空間があります.つまり,それに対して,実時間の相互作用があって,そして自分というものがその中に存在する,ということであります.例えば,手が自分に合わせて動いているということが非常に重要な部分で,自分の手と同じ様に見えている手が空間的にも時間的にも同期して動いている.さらにそれと反応している物体が,見えたり触れたりすることによって自分がその中に入っている,つまり,その場所に存在しているという感覚が生まれてくるというわけであります.すなわち,等身大の三次元空間,それへの実時間相互作用(リアルタイムインタラクション),そして,そこへの自己投射がVRの3要素です.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
日本におけるVR
サンタバーバラ会議があった2年後の1992年,アメリカでは,National Research Councilが,The Committee on Virtual Reality Research and Development という委員会を発足させます.そして1995年にはVirtual reality –Scientific and Technological Challenges― とういう報告書が出版される.つまりVRと言うトピックを重要視して,研究を行うための国としての動きがアメリカにおいてこのように動き出しました.
日本においては,1991年にICAT(International Conference on Artificial Reality and Telexistence)という国際会議を日本で初開催させました.これは,私や廣瀬先生といった,VRを研究する多くの先生方が集まって始めたものでありまして,これによって,日本のVRが“スタートした”と捉えています.人工現実感とテレイグジスタンスの研究委員会がまず発足して,それが,VR学会の発足する1996年までICATを運営しました.それ以降は,VR学会が主催し,日本発の,世界で最も早く開始されたVRの国際会議として認められています.そのあと1993年になりますと,IVR(Industrial Virtual Reality)という産業に応用する為の展示会が始まります.SIGGRAPHなどもそうですね.展示会と学術の大会とが一緒になってやっている,ということがありますけど,それと同じような形式でVRの展示会部門と言うべきものが生まれました.それに加えて,IVRC(International-collegiate Virtual Reality Contest)という学生のためのコンテストも始めた訳であります.さらに,重点領域という文部省の研究領域が認められ,それが基になり,日本バーチャルリアリティ学会が1996年に創設されました.
IVRC
IVRCについて説明させていただきます.1993年に生まれました.古いですよね.これは,VRという新しい分野が社会に根付いていき,それが本当に世の中のものになって行くとすれば,それは若い人達がVRに対して,「これは面白い」「これは重要だ」ということを感じなければならない,ということから生まれたものです.若い人達がそういった物に対して意欲を傾けなければ新しい芽は育ちません.そこで,学生が自分たちで考え,自分たちで企画し,自分たちで創り出し,多くの人に見てもらう為のコンテストを立ち上げたのであります.これはもう 1993年からですから20年くらいの年月が経っているわけであります. このVRコンテストの中心で活躍した学生たちは,現在,研究者として広く学界で活躍していますし,あるいは産業界でも活躍しているのです.そういう意味でも,IVRCを中心としてVRが広がっていったと言えます.IVRCのコンテストに関しましては,今回のVR学会大会において,予選大会が行われます.IVRCには四つのステップがあります.自分たちで企画書を作り,それをプレゼンテーションして,そのあとさらに,予選大会を経て,決勝大会という,長い道程を経ます.その予選大会を,この慶應大学でのVR学会大会の時に行うことになっております.木曜日と金曜日に行われますので,是非ご覧頂けたらと思います.因みにIVRCの決勝大会は,10月になりましてDC Expo(Digital Content Expo)が未来館で行われますが,その時に未来館で同時に開催されることになっております.
重点領域『人工現実感』
重点領域についても補足しようと思います.これは文部省が ─今はもう名前は変わって文部科学省となっていますけども─ 新しい学問分野を築くための試みとして設置する,新しい学問領域への挑戦プロジェクト研究です.1995年から1998年の間,人工現実感すなわちVRを学問領域とすべく研究したわけであります.私が領域の代表をつとめ,また『人工現実感の解明に関する研究』に関しては研究代表者として携わりました. また『感覚提示と感覚・行動相互作用に関する研究』に関しては,佐藤誠先生が, 『バーチャル世界の構成手法』に関しては,廣瀬通孝先生が,『体内および外部世界の人工現実感の評価研究』に関しては,伊福部達先生が,研究代表者となって研究を行いました.このVRプロジェクトにおける四つの視点は,非常に重要な視点でありまして,特に『体内および外部世界の人工現実感の評価研究』はこの時期においては,とても斬新だったと思います.今では当然と思われるかも知れませんが,やはり世の中の関係という視点を堅持しながら技術を進めていかなければいけないというのが,当時としては新しいことであり,非常に重要な使命でありました.
その重点領域『人工現実感』の一つの成果として,日本バーチャルリアリティ学会が1996年の5月に設立されて,現在に至っていることは,先程申し上げたとおりであります.2000年2月には,研究成果が纏められ,『人工現実感の基礎』,『人工現実感の設計』,『人工現実感の構成手法』,『人工現実感の評価』の4冊の本として上梓されています.現在では,バーチャルリアリティが学問分野として定着し,日本VR学会から『バーチャルリアリティ学』という教科書が出版されるに至っていることは会員の皆様が良くご存じの通りです.
VRの展開
VRの展開を,まとめて年表ふうに見てみますと,1989年にVPLがData Glove とEyephoneを発売し,VRという用語が普及しました.そのあと1990年のサンタバーバラ会議を経て,1991年に日本では人工現実感とテレイグジスタンスの国際会議であるICATが開催されます.アメリカではNational Research CouncilにおいてVRの委員会が設立される.そして1993年にはIVRとIEEE Virtual RealityつまりIEEE VR国際会議の前身となるVRAIS(Virtual Reality Annual International Symposium)と,Research Frontiers in Virtual Realityが開催されました.そしてIVRCの最初の開催も93年です.96年に日本バーチャルリアリティ学会が設立され,2001年には,IEEE Virtual Reality国際会議が日本で開催されました.2008年には,米国のNational Science Foundation(NSF)が,今世紀に達成すべき14の重点技術目標の一つに「バーチャルリアリティ」を採択した.そういう意味でも,VRは今後も発展が期待されている技術であります.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
第3次3Dブーム
さて,2010年になって,3D映画に加えて3Dテレビが本格化して,第3次の3Dブームになります.このブームは割と早く下火になったように見えますが,これは3Dの宿命でもあります.しかし,こういう3Dのディスプレイは,次にまた,様々なところに普及してきますので,次に来たるべき3Dブーム,そして続いて来るであろう第2次VRブームへの大きなステップという位置付けになって行きます.
何故3Dは短命に終わるのか
それでは,なぜいつも3Dは短命に終わるのでしょうか.それは,3Dというものが,実世界の視覚体験の再現を目指している以上,VRでないと不可能だからです.どうしてかというと,3次元にしたとたん,大きさと距離が確定する.つまり,例えば,大きさの違う3次元のディスプレイで,同じ人間の映像を見た時に「大きな画面で見ると大きな人」,「小さな画面で見ると小さな人」になってしまうのです.これは必然的です.本来3次元のディスプレイでは,ディスプレイが小さい時には,全体のある部分しかみることができないわけです.3次元を切り出しているため,もし全部見ようとすると,左右に画面を動かさないといけない.それを無理やりに,全体を小さな画面の中に入れた途端に,おかしな事になってしまう.正確な距離と大きさではなくなるからです.2次元においては,同じ映像の放送を小さい画面にも,大きい画面にも,ワンセグにも,巨大な画面にも送れますが,3次元の放送になったとたんに,そういう方法では通用しなくなるのです.これが3Dの本質なのです.
だから結局,3次元は,普通に作っていると大体うまくいかなくて,目が疲れたりしてしまう.今の映画は大画面ですので,3Dを熟知したキャメロン監督がしっかりと作成したAVATARを映画館の大画面で見ると自然ですが,家庭のテレビ画面のサイズで見ると不自然になります.劇場の大画面で見ても,疑似3次元といって,2次元からもう一回作りなおしたものは,だいたい駄目です.それは映画を撮る時にちゃんと,3次元用の手法を用いて撮らないといけないからです.そもそもズームなどという手法は,とうてい3次元ではありえない手法です.自分が近づいていくとか,モノが近づいてくることによって,大きくなっていくわけでありまして,近づきもしないでズーミングというのは,2次元でのみ有効な手法です.こういったもの全てを含めて,3次元的な手法で撮らないと上手くいかない.だから不自然な3次元は2次元よりも不自然だったり,疲れたりする.不正確なものは,人間の感性は受け付けないのです.人間の感性は,正確な3Dでないものは本能的に許容しないのです.
正確な3DはVRに収斂する
3Dができると,次の段階として,回り込んで見たいとか,あるいは全周囲を見回したいとか,そういう気持ちが必ず起きるものです.そうなると必然的にVRのような人を包囲する大画面か,眼鏡型になります.また頭の動きが伴う場合,「酔い」の現象をなくすためには,正確な3次元の実現が必須です.そういう意味でも,正確な3DすなわちVRが結局必然になってきます.
また,3次元を見ていると「ものを触りたい」「見えたものを触りたい」「見たように触りたい」となりますね.こういうものを,実現するのがVRで,自分の手というものが,3次元空間の中にあって,自分の手と空間的にも時間的にも同期して動かないといけない.結局自分の手が同期して動いて,ものが動くというインタラクションが生まれて,はじめて本当に自分がその場にいるという感覚になり,触っているという感覚が生まれるわけです.そういったものがないといけないのですね.結局3Dが出てきては,長続きしないのは,それを完結させるためのVR技術が未完成であるから,とも言えます.つまり,我々に課せられた責務とも言えますが,VRをもっと発展させて,VRな3Dにしないと長続きしない,というわけであります.
3Dが流行った時に,すぐ次のVRブームが出てくるというのは,3Dで何が足りないかが分かり,そこを解決するためのVRが出てくるからです.こういった関係性から見ていきますと,本格的な3Dが出てきた1920年代,そして第1次3Dブームと言われた1950年代,第2次3Dブームの80年代,そして今の2010年(第3次3Dブーム)ということになりまして, 3Dは30年周期であることがわかります.つまり3Dは30年周期でブームになっています.そして,2,3年でブームが終わります.3Dの後に10年くらい遅れて,VRの黎明期,そして最初のブームが出てきておりますので,2020年台に,また次のVRの波が来るのではないかと予測されます(舘予想).その波が来たとき,その波をしかと受け止め,支えるのは,他でもない,ここにいらっしゃる皆さんなのです.だから今のうちに一生懸命,このVRの技術を高めて,2020年台にやってくるVRブームに,いい花を咲かせるための研究をしておいてほしいと思うのです.来たるべき次のVR時代の成否を分ける鍵は,ここにいる皆さんの手の中にあるのです.
第2次VRブームに向けての研究課題
一つは「裸眼の立体ディスプレイ」これは非常に重要です.2番目は「身体運動の非接触計測」です.このことをしっかりやらないと,一切使い物にはならないでしょう.3番目に「さわれるVR」.英語でも,実物の,とか実感できるという意味で,じかに触れられる,という意味のtangibleという言葉が使われますが,さわるということは大事です.次は「五感の情報融合」.既に言われている事ですけども,改めて重要です.そして「臨場感」と「存在感」.臨場感を高め,存在感を作る.それから,実世界に応用させるということになりますと「拡張現実感と人間能力の拡張」.最後に,我々がやっている「テレイグジスタンス」というのが,研究課題になってくると思います.
そして,技術的な課題としては,部屋全体を覆うような大型ディスプレイがないと,3次元はきちんと出せない.これは明白です.照明の機能も持たせて,部屋全体をLEDや有機ELなどで囲み,壁,天井,床など部屋全体が照明でありDisplayであるものが求められるでしょう.それと同時によく言われていますが,眼鏡のような小さい小型のディスプレイも求められています.また触覚センサーと触覚ディスプレイについては,まだ標準がないのですね.視覚とか聴覚に関しては,決まったものがあるのですが,触覚に関してはない.そういうところをきちんと詰めていきたい.その他にも必要な研究分野としては,人間の生体信号計測と,ネットワークの遅延対策といった課題も挙げられます.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
Telexistence
前半部分を,3Dの歴史を紐解きながら,3Dの流れの中のVRということで,お話しさせていただきました.後半,つまり80年代以降の流れは,生き証人としての私の軌跡と重なってまいります.その真っ只中で,80年代から研究しておりましたテレイグジスタンスについてお話しさせていただきたいと思います.テレイグジスタンスというのは“tel + existence”ということで,離れて存在することです.“tele”あるいは “tel”というのは,必ずしも遠いということではなく,近くても“tele”でありまして,離れても存在するのがテレイグジスタンスということであります.必ずしも遠隔というのではなく“tele”という言葉は“離れている”という意味なのです.telephone→ videophone →teleoperation →telepresence / telexistence. つまり,まずtelephone. 次に来るのが ―televisionですが,TVは多少違う意味になってしまいましたので─ videophone,それからteleoperation,telepresence / telexistenceという形で進展してきているというわけです.
MITでの在外研究
どうしてテレイグジスタンスのような概念を思いついたか,ということをお話しします.1979年から1980年にかけてですが,そのころ長期在外研究員制度という制度がありまして,国から派遣されて海外の大学で研究をいたしました.米国の MIT(マサチューセッツ工科大学)に赴いて研究していました.MITでは,ちょうどRobert W. Mann教授が,目の不自由な人の為の装置を設計する為のシステムを考えていました.実際の物が出来ていたわけではなく,思考設計していた段階でした.目の不自由な方のための装置というものは,それぞれの人によって,一つ一つ違いますし,一品生産で,大量に作ることが出来ない.それと同時に,コストがかかるので,実際の製品として,何回も作り直すということが出来ない.そういうわけで,やはりコンピュータを使ったシミュレーション環境の中で,最適なものを見つけていくべきだ,という考えになるわけです.ですから,人間・装置・環境シミュレータというシステムを考えて,その中で人が実際の環境内を歩くのです. その環境モデルというものが,コンピュータの中にありまして,実際に人が装置を使う時の動きを計測する事で,装置はいろいろな装置に成りうる訳ですけども,こういう装置にした時には,どういう情報が得られて,どういう形で人に与えれば,人が上手く歩けるか,といったことを調べていく.そういう風に装置を変えながら,設計していく事がいいだろうということを提唱したのであります.
実際のものはまだ何も出来ていなかったので,私がそこで,Selspotという計測システムを使って,人間の動きを計測して,人に環境情報を提示する装置を作り,どういう風に情報を与えるのが良いかという,最初の基礎的な研究をしました.私は,その時既に,日本で盲導犬ロボットというものを研究しておりましたので,ちょうど盲導犬ロボットが環境から情報を得た時に,その情報をどうやって人間に伝えたら良いかというようなことに適用して,システムを作りあげ,それを使って研究したわけです.その結果は,IEEEの『Quantitative Comparison of Alternative Sensory Displays for Mobility Aids for the Blind』という論文になっています.
課題の発見
1980年7月に日本に帰ってまいりまして,まだMann先生の考えたシミュレータが未完のままでしたので,それを完成させたいと思いました.しかし実際に人が歩くのでは,やはり危ない.そこで,少し離れて体感出来ないか考えた訳であります.違う別室に人がいて,そこで実際に人が歩いているかのような感覚を,実装させる事はできないのか.さらにそこのところにあるものを映像で撮って,そこに自分が居るような感覚を作れないかと.目が見えている晴眼時からですね,だんだん目が見えなくなっていくような状態を作って,それにともない歩き方が悪くなっていくので,歩行補助装置によって補うことで,見えていた時の動きに近づけていくという指標のもと設計していくのが良いのではないか,と思い至りました.
そのために解決しなければいけない課題として,別の場所にいて,その場所にいるような感覚を生じさせなければなりません.それは,非常に面白い課題なので,その頃はそればかり考えていました.別室に居て,その部屋に居るのと同じ感覚を生じさせるなどということは,果たして実現できるのか.勿論,音では実現できる事がわかりました.昔から音では臨場感ということで多くの研究があります.別室にダミーヘッドを置き,その耳のところでマイクロホンで撮った音を,ヘッドフォンを使って聞いて,一方,聞く人の頭の動きを計測して,その動きに合わせてダミーヘッドを制御すれば良いだろうという,そういうことは分かりました.
テレイグジスタンスに思い至る瞬間
では,視覚ではどうなのか.その時丁度,そのことを考えながら研究所の廊下を歩いている時でした.ふと,人間は映像を3次元で見ているつもりでいるけれど,それは頭の中で作り上げていることに過ぎないのであって,本当は,人間の網膜にあるものしか存在しないということに思い至りました.つまり,2枚の網膜に写る映像だけが,人間の得ている情報であり,それだけを使って,人間がもう一度頭の中で,3次元を創り出しているのだ,ということの再発見です.そのことに気がついたのですね.だから,今見ている世界とは,実際人間が頭の中で創り出している世界ということになる.人間が得ている情報は,単に網膜の上にある映像だけなので,その網膜にある映像は人間の頭を動かしたり,身体を動かしたりする事によって変化する,その現象を利用して頭の中でこういう世界を作っていっている.そうであれば人間の網膜に,その場に居るのと同じ映像をいつも与え続ければ,つまり,人間の頭の動きに合わせて,人がその場にいれば見ているであろう映像を映し続ければ,その時,人間には全く同じ様に見えるに違いない.
1980年9月19日のことです.すぐさま部屋に戻り,アイディアからシステム構築まで一気に頭に浮かぶすべてを書き上げました.それを「テレイグジスタンス」と名付け,実際のシステム構成の詳細を設計しました.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
特許出願と注目発明
それさえできれば,当初の盲人用評価装置も構成できるはずです.人が別室で歩きながら,実際の環境で得ている情報と同じ情報を得たり,情報が制限される場合にも,装置を用いて補って歩行を補助したりする装置を設計し評価するためのシミュレータを構成するという元々の問題も解決しました.12月になって,それを解決する『盲人用歩行補助器評価装置』の特許を出しました.これは,後ほど,科学技術庁長官選定の第42回注目発明に選ばれました.さらに,別室にロボットを置いて,そのロボットが得る三次元映像を離れた場所に居る人間にテレイグジスタンスの方法で与えれば,ロボットのマニピュレータの操作を,自分があたかもロボットの中に居るような臨場感をもって行える.これは『感覚情報呈示機能をもったマニピュレータの操縦方法』ということで,これも特許として出願したわけであります.
世界初のロボットによる幽体離脱体験
実際に,まず視覚だけのテレイグジスタンス装置を設計し作成しました.人間の網膜に,その場に実際にいれば得られるであろう同じ映像を与えるということを考えて設計し,それが出来るような装置を作りました.そのときは,まだ左右の水平回転の動きだけですが,それでも人の頭の左右の動きに合わせて,その場で見たのと全く同じ映像が見えました.
1981年に最初の装置ができ上がり,それを使って,まず,自分で自分を見るという体験をしました.この時のことは今でも鮮明に覚えています.これは何とも言えない非常に,不思議な体験でありました ─まさに幽体離脱のような感覚─を受けたのです.「見ている自分」がここにいて,大きさも全く同じ形も同じ三次元空間内に「見られている自分」が,しかも目の前にいる.これは30年前なので,今では皆さんは,そういう経験も体験しやすいかと思いますけども,この当時はこの装置を使う以外にできなかったわけでありまして,いわば,ロボットによる幽体離脱体験の世界最初の体験といっても決して過言ではないでしょう.そういう意味でも,非常に衝撃的な経験でした.そして,この経験がその後の私の研究の原点になっています.
最初の論文
原理がまとまり,最初の装置もできて,最初の発表という事で,1982年に7月のSICEの学術講演会で発表したのですが,それが,この30年前の論文なのです.今の皆さんの予稿はワープロですけども,この頃は手書きなのですね.原文をつくり清書するのです.これがテレイグジスタンスの最初の研究報告で第1報です.この「テレイグジスタンスの研究」は,報を重ね現在では第72報まできています.
大型プロジェクト「極限作業ロボット」原案の起草
その頃,私は,機械技術研究所という通産省の研究所におりましたが,丁度そのとき,通産省で新しいロボットの研究のプロジェクトを模索しておりまして,そこから相談が来た訳であります.それで,テレイグジスタンスを基盤にした新しいロボットに関するプロジェクトの原案を起草しました.これも手書きなのですけども,それが採用され,大型プロジェクト「極限作業ロボット」になります.
それと同時に,最初の実験装置を改良してマスタースレーブ型,人が首を動かすとそれに合わせて,ディスプレイも動くものを構成します.それだけでは使い勝手が良くなかったので,インピーダンス制御型ディスプレイのシステムを,この頃まだインピーダンス制御という言葉自体もない頃ですけども,開発しました.そして,さらに車型のロボットに取り付けます.これは,自分がその場に居て,つまり,そのロボットの中にいて,ロボットの車体に座って操縦している,運転しているという感覚で,ロボットを操作する事が出来る.最初のモデルが仕上がったのは真夜中で,それから夜が明けるのを待って研究所の敷地内の道で実験したのを覚えています.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
自己投射の実現
さらに1988年になりまして,マスタースレーブシステムを作り上げました.何度も改良され,最終版は1989年完成です.これによって,ロボットの中に,自分が居るという感覚を生み出したというわけです.この時に,自己投射性が,3次元で実現している,つまり,自分の手が見えると同時に,自分の手とロボットの手が空間的にも時間的にも完全に同期して動いている.そのことによって,ロボットの手を本当に自分の手であるという風に感じるのですね.目を瞑っている時に,自分の手が感じる体性感覚と,目を開けてみたときに見える映像が一致している,これが非常に大事なのです.それを自己投射性と呼んでいるわけですが,それによって,自分がロボットの中に入りこんでいるという状態が生まれます.これは同時に,コンピュータの生成する3次元世界であるバーチャル環境へのテレイグジスタンスとしても実現されました.
テレイグジスタンスとテレプレゼンスの違い
テレイグジスタンスの特徴はテレプレゼンスとはどう違うのですか,ということですが,どちらも同じ1980年に,日米で独立して生まれたという事なのですが,テレイグジスタンスの場合は,テレプレゼンスと違って,バーチャル環境というものを常に意識しています.実際,1983年には,バーチャル環境を利用して操作するシステムの特許を出しています.バーチャル環境へのテレイグジスタンスです.つまり,人間の側は,実環境でもバーチャル環境でも同じシステムであり,人がテレイグジスタンスする環境が,ロボットのいる実環境なのか,コンピュータの生成したバーチャル環境なのか,という違いだけです.しかも実環境とバーチャル環境とを接合性をもたせることで,実際はバーチャル環境で動いているのだけれども,実環境でロボットが動くということをも可能にします.例えば,暗闇の中であっても,映像を可視化する事で,実際に作業したりすることが出来ます.つまり拡張型テレイグジスタンスです.
アールキューブ構想とHRPプロジェクト
その後1995年に,「アールキューブ構想」というものが生まれました.これも,通産省での新しい構想のなかで,テレイグジスタンスを一つの中核として,それをさらにネットワークで繋いで,いろんなところで利用できる様にしよう,という試みであります.アールキューブが発展して1998年にHRP(Humanoid Robot Project)が生まれます.HRPは,途中からHumanoid Robotとしての性格ばかりが強調されてしまって,本来の通信部分が,計画の前半だけとなってしまい,非常に心残りなのですが,しかし,その前半の成果として,人間が二足歩行ロボットにテレイグジスタンスできる,ということを初めて示すことはできました.2000年4月5日のことです.
RPTによる存在感の実現
さらに,遠隔の地にあるロボットへテレイグジスタンスした状況を考えてみます.ロボットの中にテレイグジスタンスした人は,あたかも自分が遠隔の地にあるロボットに入り込んだような感覚を得ることができます.ロボットの周りにいる人も臨場感をもって見られます.しかし,そのロボットの周りにいる人からすると,見えるのはロボットなので,そこにいるのはロボットだと感じてしまいます,例えば,私がロボットを使って講演することで,私は講演の臨場感を味わう事が出来ますが,私は私のつもりでも,皆さんから見ると私はロボットである,ということです.そこで,研究開発したのがRPT(Retro-reflective Projection Technology)です.RPTを考案し,それを利用して問題を解決しました.RPTを用いたロボットを,2005年に,愛知万博のプロトタイプ事業で展示致しました.RPTに人を映し出すということで,そこに,そのロボットを使用している人が存在している様に見える,という事であります.この再帰性投影の良い点は,一つのスクリーンにいくつもの投影を同時に行い,しかもそれらが重ならないように見られるという点です.従って,複数の人が,ロボットに使用者の複数の方向からの映像を投影し見られます.つまり,正面から見る人は使用者の正面からの映像を,横から見ている人は横顔を,同時に実時間で見られるので,使用者がロボットの中に入って,そこに居るという使用者の存在感を,周りの人たちが感じることができるのです.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
360度裸眼ディスプレイ「TWISTER」
もう一つはTWISTERというもので,これは,周囲360°特殊なメガネなしで3次元が見えるというものです.CAVEと同じく包囲型ですが,シャッターメガネや偏向メガネを使わないで3次元が実現できるのです.短冊形のLEDディスプレイを遮蔽板と一緒に円筒型に並べて回転することで,裸眼での視差が実現できます.そのTWISTER間でコミュニケーションが取れる様に,丁度私が慶應大学に移った時に,東大のTWISTER IVと慶應のTWISTER Vとの間で通信実験を行いました.2台の離れた場所にあるTWISTER同志で,共通のバーチャル環境を用意して,その3次元の環境を両方が見ています.同時に,TWISTERの中に入っている人をTWISTERの外側の円周状のレールを走行するカメラで撮ります.TWISTERの特徴の一つに,中に入っている人が外から透けて見えることがあります.その特徴を利用して,使っている人の映像を互いに撮影しあって送りあい,バーチャル環境下のアバターロボットに映し出して,互いにバーチャル環境にいる人を実時間で見ます.アイコンタクトしながらのコミュニケーションができるというわけです.バーチャル環境は,作業場や会議室やパーティ会場など自由に設定可能で,原理的には何人でも同じ条件で参加出来ます.
ではバーチャル会場ではなく実際にパーティ会場に行くには,どうすればいいか.これはみんなが集うパーティ会場に,自分の分身ロボットを使って,パーティ会場に入るということで実現します.この場合もTWISTERを使って,会場内のTELESARロボットに入り込むということにより,360°パーティ会場が見えるという利点を生かしつつ達成できます.離れた場所にあるTWISTER内に居る遠隔参加者が,パーティ会場に配置されたTELESAR IVという分身ロボットを利用して,パーティ会場を移動してまわり,パーティ会場に直接参加した参加者と話し合い握手し,アイコンタクトしながら集えることを2010年に実験的に示しました.なお,パーティ会場にいる直接参加者も,分身ロボットに投影された遠隔からの参加者の顔や表情を実時間で見られるので,遠隔からの参加にもかかわらず自然なコミュニケーションが行えます.
Haptic Telexistenceと触原色
ここまで主に視覚を中心とした研究についてのお話をしてきましたが,次に触覚の研究についてお話ししたいと思います.触覚というのは,“実感する”ということにとって,とても重要なもので,最近特に触覚についての研究を進めております.前に挙げました触覚の標準形の確立をある程度,目指して研究を進めている次第です.映像においては,RGBを用いた3原色というものが,標準になっています.触覚にも同じような物があるのではないかと仮定しそれを「触原色」と呼んでおります.実験的に触原色原理を検証しつつ,触原色原理に基づいて,触覚情報を採取,転送し再現するための研究を遂行しております.
TELESAR V
触覚を組み込んだテレイグジスタンス・システムも出来ておりまして,5代目TELESAR ,TELESAR Vと呼んでいます.これらは今回のVR学会で公開していますので,よろしければ実際のものを見ていただきたいと思います.これからのバーチャルリアリティの未来図ですけれども,テレイグジスタンスを使うことによって,離れた人とも自由に対面で話すことが出来る.また,離れた場所からでも,パーティの参加や自由に買い物することも可能になります.将来は世界中にテレイグジスタンス・ロボットを配置しておいてインターネット等で見ながら,空いているロボットを自分で予約して,その中に入って自由に動き回るという,そういう未来を描いています.
テレイグジスタンスの展開
そういうことによって,使い道が増えます.例えば,スポーツジムやレジャー施設に入って運動を行ったり,あるいは,例えばスキューバダイビングやヒマラヤ登山のように,普通ならば,事前に十分なトレーニングなどを積むことが必要とされるような場所であっても,簡単に行ったりすることも出来ます.あるいは動物や昆虫のような小さな世界にでも,小さなロボットを上手く利用することによって入り込み,動物や虫と暮らすといった新しい体験もできるでしょう.分身ロボットを自宅に置くことによって,自由に自宅に戻ったり,別の家にある分身ロボットを許可を得て利用して,例えば,祖父母の家や孫の家など別のお宅を訪問したりもできます.またクリーンルームなどのように逆に人が入ると環境を乱してしまうような場所,そういったところにも入り込んで作業することもできる.また遠隔医療も実現できる.加えてとても小さなもの ─相当未来になりますが─ 『ミクロ決死圏』のように人間が体内に入って治療することも,テレイグジスタンスの活用でバーチャルに(実質的に)出来るようになるということです.
また救急車内にロボットを置くことによって,テレイグジスタンスによる緊急医療も実現できるということです.もちろん危険な環境下での作業も安全に実現できる.また衛星に分身ロボットを積んで,多くの宇宙飛行士が感じた「宇宙からの平和」というものも実感できるわけであります.さらに,研究支援での利用では,人体に影響を与える危険のある研究も,テレイグジスタンスによって,安全に,それでいて,人の臨機応変な感覚や認知能力を上手く使いながらできます.
このように,産業・サービス・医療福祉・公共事業・日常生活支援・研究支援での多くの利用が期待できます.
| 原点回帰 | 3Dは30年周期 | 3Dの原点 | 3D前夜 | 3Dの黎明期 | 最初の3Dブーム | VRの黎明期 | 第2次3Dブーム | 最初のVRブーム |
| 1980年代にVRの源流が各分野で進展 | Virtualとは | VRの3要素 | 日本におけるVR | IVRC | 重点領域『人工現実感』 | VRの展開 |
| 第3次3Dブーム | 何故3Dは短命に終わるのか | 正確な3DはVRに収斂する | 第2次VRブームに向けての研究課題 | Telexistence |
| MITでの在外研究 | 課題の発見 | テレイグジスタンスに思い至る瞬間 | 特許出願と注目発明 | 世界初のロボットによる幽体離脱体験 |
| 最初の論文 | 大型プロジェクト「極限作業ロボット」原案の起草 | 自己投射の実現 | テレイグジスタンスとテレプレゼンスの違い |
| アールキューブ構想とHRPプロジェクト | RPTによる存在感の実現 | 360度裸眼ディスプレイ「TWISTER」 |
| Haptic Telexistenceと触原色 | TELESAR V | テレイグジスタンスの展開 | 他者としてのロボットと分身としてのロボット |
| テレイグジスタンスで自己を知り拡張して保存する | Human Augmentation | 質疑 |
他者としてのロボットと分身としてのロボット
「他者としてのロボット」とは,それ自体が独立した存在であり,それ自体がそれ自体の意志を持つということです.従って,そのロボットへの命令は,話し言葉か指示書かコンピュータのコマンド等のいわゆる言語によります.アトムやデータはロボット開発の目標としている他者としてのロボットの代表例であり,チャペックの『RUR』に登場するロボットや手塚治氏が『鉄腕アトム』で描いて見せた,アトムと同じような機能を持ちながら悪の限りをつくすアトラスというロボット,あるいは,スタートレックのロアは,決してこうなってはならないという他者としてのロボット開発のいわば反面教師です.
一方,「分身としてのロボット」は意志を持ちません.意志はあくまでも人間が持つものであり,従ってロボットはあくまでも人間の一部です.命令は言語を介してではなく,人間の挙措動作や内部状態に基づいて自動的に行われ,ロボットは人間の意のままに動きます.最も分かりやすい例は,失われた手のかわりをする義手です.スターウォーズの『帝国の逆襲』の最後の場面でルーク・スカイウォーカーが失われた手に代わって,もとの手と同じように自在に動く義手を装着する場面があります.人間は特別に意識せずに自分の手を動かすのと同じ感覚で義手を操るのです.
もし,この手が人間に第三の手としてついたとしたらどうでしょうか.これも人間の意志に従い自然に動作し人間の能力を拡張します.人間の体から離れてもかまいません.人間から離れた別の固体としてのロボットが言語を介さず肝胆相照らすというように人間の意を汲んで,しかしロボットとしての意志は全くもたず人間の一部として行動するならば,これは「分身ロボット」です.分身ロボットは一体の必要はなく複数体でかまいません.孫悟空の分身の術としてのロボットです.
この分身ロボットに人間が入り込んだような状態をつくり,ロボットの感覚器を介して環境を認識し,ロボットの効果器を用いてロボットを自在に操ることも可能です.これが「テレイグジスタンス」にほかなりません.テレイグジスタンスを用いれば,人間は時間と空間を越えて存在できるようになります.すなわち,テレイグジスタンスは,人間が同時にどこにでもいるかのように感じさせる,すなわち「人間をユビキタスにする技術」であると言えます.
テレイグジスタンスで自己を知り拡張して保存する
このテレイグジスタンスが目指すのは,自己の存在の拡張(空間)と自己の存在の保存(時間)の二つです.そして大事なことは,それと同時に,テレイグジスタンスは,自己を知る為の強力なツールでもあることです.
今述べました内の,拡張という意味では,SFのStar TrekのHolodeckというものが分かりやすい例として挙げられますが,テレイグジスタンスはいわば,Virtual Holodeckと言うことができるわけです.ドラえもんの道具でいえば「どこでもドア」ということですが,これもテレイグジスタンスによって実現する可能性が出てくる,というわけであります.保存については,その人の存在のすべてを記憶できるということです.
自分自身を知る道具としての,テレイグジスタンスの持つ意味は極めて重要です.“自分を見る,知る”という原点回帰は認識すべての根本となります.私にとりましては,まさに30年前に経験した,ロボットを用いた幽体離脱感覚の実体験が,今でも研究の原点となっています.見ている自分が自分なのか,見られている自分が自分なのか.自己とはいったい何なのだろうか.そのような根源的な問いを突き付けてきます.
テレイグジスタンスは,自分というものを第3者の視点で見るための「新しい鏡」であるとも言われますが,その言葉が雄弁に語っていますように,自分自身を,時間と空間を隔てて,文字通り客観的に見ることによって,新しい人間研究が実現できるのではないかと考えます.すべての学問は究極のところ,人間を知ることに始まり,そして人間を知ることに行き着くとも言えるのではないでしょうか。
Human Augmentation
私たちの研究室では,Human Augmentationということで,科学技術によって,人間の感覚知覚を回復したり拡張したり,あるいは知的な能力を拡張したり,運動能力を,時間感覚も含め拡張するということの研究をしています.本講演では,このバーチャルリアリティの原点回帰という観点から,テレイグジスタンスの流れを中心に,3DとVRの関係,これからのVRについての展望も含めながらお話しさせていただきました.ご清聴ありがとうございました.
質疑
質問者:舘先生のそもそもの研究(盲導犬ロボット等)のきっかけは“社会貢献”といったようなことからだったのでしょうか?
舘:科学技術が如何に人にとって有用な物になりうるのか,ということが原点にあります.古くはCyberneticsに遡る考えですが,科学技術を使って,人間の失ったもの,あるいは,足りないものを補うことによって,新たな能力を人間に付与していく,ということです.つまり,ロボットを使って人間の能力を拡張する,人間を支援する.その人間の支援の仕方にしても,誰かに頼んでやってもらうというのは,気が重いことです.また,自立という観点からも好ましくありません.つまり他者としてのロボットだと,ロボットであっても,やっぱり他者になってしまいますので,それより自分自身の分身ロボットのほうが良いのです.何も言わなくても自分の意志に応じて,動作してくれる.例えば,義手を例にして説明すると,義手を使う時に,「前,後,上,下」と言って義手を動かすのではなくて,何も言わなくても上げようと思った時に上がることが望ましいわけです.それと同じ様に,例えば第3の手があって,その手が色々手助けをしてくれる場合でも,自分が使おうとする時に,言語で命じるのではなく,欲しいときに,さっと手が上がる,そういうものでなくてはいけない.こういうような分身型が望ましいのです.それが第三の手を超え,ロボットとなったとしても,それは分身型であるべきです.そのロボット自体は意思を持たずに,自分の意思に合わせて,何も言わなくても動いてくれる,そういった分身ロボットを求めています.私たちの追求しているシステムは,常に人間を中心にして考えた科学技術であるということであります.
質問者:私は普段コンシューマの製品を扱っている者です.今御説明のあったようなVRの技術というものはまだまだ応用するのは困難ではないでしょうか.もっと近い将来に応用できるVR技術が何かないでしょうか?
舘:そのことに対するお答えは一言でいうのは難しいのですが,次のようにご説明させていただきたいと思います.まず,そのような既成の物があればいいと思われるかもしれませんが,実はそのような物が転がっているわけではありません.基本的にやっぱり自分で創る─生み出していく―というのが大事なことなのではないでしょうか.というのは,いわゆる今のiPhoneとかそういう類いのものにしても,技術の基は日本にもあるのです.その物自体は転がっていないけれども,その基となる物の多くが気付かれずに存在しているのです.例えば過去のSIGGRAPHの展示などにも技術の芽はたくさんあるわけです.あるいは,丁度今,SamsungとAppleの間で特許の係争が起きていますけれども,あれも元を辿るといろんなところでもう既になされている技術が使われているということの証左です.つまり,従来型の発想に立って開発していると,技術はあっても,新しいものが生み出されない.逆に発想を変えれば,今既にある種から新しいものを発想できる,ということです.
例えば,ウォークマンの開発でも同じことが言えます.もし若い人が下から提案して,ウォークマンを作りたいと言っても「君,一体誰がそんなものを使うんだ.大体そんなもの邪魔で使わないに決まっているじゃないか.ヘッドフォンを頭に付けながら生活するなんてありえない」と,皆から袋だたきにあい却下されてしまうでしょう.でもあれはソニーの盛田さん自身が自分で言い出したものなので(井深さんが飛行機にのっても音の良いステレオを聴きたいといったのが始まりとも言われていますが),強い反対があっても,それを押しのけて作られた.結果として,それが一気に世の中を変えたわけです.ウォークマンを付けて,音楽を聴いて歩くという,つまりそれは,テニスなどのスポーツをしながら音楽を聴きたいという盛田さんの強い願いが発想の原点であるわけです.日本のちょっといけない点は,下から上がっていくと,いろいろな関門が多く,そのたびに批判されることが多いことです.それで「これはできないよ」とか「既にあるよ」とか「そんなことやって誰が使うんだ」とかの類いの批判で,そういうできない理由を挙げるのは簡単なので,そういうことを言う人が何人も,何層にもあるわけで折角良いアイディアでもボツになってしまい日の目を見ない,というような傾向があって,そこは大変残念です.
Steve Jobsとか森田さんとかはトップダウン的に行い,発想したものを現実化できたわけですね.実際に作って世に出して,それを使って見せてみると,世の中が変わって来る,ということが起きるわけです.今世の中にある技術を知り駆使し,アイディアを生み出し,眼前に新鮮な驚きと楽しみを繰り広げてみせる,ということが大切です.
VRの技術も,我々がやっているのは,どんどん先へ先へと行っているので,そのまま使うのは,まだ無理かもしれません.しかし,それを種として熟成したものにすることで,上手くいく.例えば,機械式のシャッターメガネだったものが液晶式になることで,実際に使える様になってきているわけです.
ですから, VR学会等にも積極的に参加していただいて,その中で自分の目で見て,自分のなかでこれは行けそうだ,という種を上手く見つけて自分のアイディアと融合させていくということが大切です.やはり企業の方ですので,きっと上手い考えが湧いてくるでしょう.その後は賛同する人を上手に見つけていって実現に漕ぎ着け,是非良いものを作って,VR製品をどんどん世に出していっていただければと思います.
幸い,現在かなりVRを利用するという方向に世の中の動きが進んで来ています.少しずつ,ものに成り始めているのではないでしょうか.そういう意味では,世の中の既成のニーズに捕らわれず,ニーズは作りだすものとの信念を持つことです.そして,技術をそのまま使うのではなく,それを種として上手く熟成させることにより,自分の作りたいものが初めて生まれてくるのです.
伊福部(日本VR学会 会長):舘先生は御自身がテレイグジスタンスの歴史そのもので,本当に感銘を受けます.繰り返されて進歩している技術とは,そのまま,その延長上で行って,繰り返されるだけではなくてですね,人間を知る武器として使って,そしてその人間を知る道具として,人間を理解する研究とインタラクティブに進めるというのがVRの大きな道じゃないかなって気がするんですね.これは私の3次元映像の経験なのですけれど,例えば,先天的な目の見えない方が,角膜移植をして目が見えるようになったとしても,脳の方が3次元映像に変換できないのですね.そういうことがあったり,逆に認知症による脳血管障害で視覚野から頭頂葉野に行くまでに,空間認知の領域があって,そこが脳出血でやられると3次元の認識とか,あるいは視野が欠けてしまうといった,そういうところにも,この技術を利用しながら今度は“脳がどう3次元映像を獲得していくのか”というメカニズムを仮説を立てて追求して,その仮説を実証する為にまたVR技術を進歩させると.
そういう風に,人間を知る為の武器と人間を支援するツールとしてのVRの両方がぐるぐる混じりながら,そうやって進歩していくのが一つのやりかたかな,と思うのですけれど,というより,むしろ若い先生方に是非やってほしいな,と思っているのですが.
舘:まさにその通りです.今回もそのようなセッションも設けられているのですが,まず,人間を知る道具として用い,そうやって人間を知りつつ,さらに新しい装置を作って人間を支援していく.そうやって,VR技術を社会に役立つ様にしていくというような構造の中で,研究していけたらと思います.実際に,私もまさにテレイグジスタンスを使って自分の後ろ姿を見るという実体験をすることが,次の研究への大きな動機になりましたので,皆さんにも是非お勧めしたいと思います.
それと同時に,何回も申し上げましたけれど,スタートレックの中のHolodeckのようなものを作りたいと思っている方も多くいらっしゃるでしょうから,こういった思考上の夢を,最終的には現実に動いている様に,技術的にも磨いていく,そういうような技術の進歩にチャレンジしてゆくことも期待していきたいと思います.VRを使って己を知り,能力を回復させたり増強させ,そして保存してゆく,まさに空間時間を超えてゆく科学技術として高めてゆきたいものです.