2019年11月26日
テレイグジスタンスAVATARロボット TELESAR VI を初公開
自分の分身(AVATAR)として、離れたところにいても、その場にいるように見て聞いて話して様々な所作ができるテレイグジスタンスロボット「TELESAR VI」を、2019年11月26日(火)に東京大学本郷キャンパス伊藤謝恩ホールで開催されたJST ACCEL「身体性メディアプロジェクト」成果報告 Symposium & Exhibitionの会場で公開いたしました。最先端技術を用いてAVATARを実現することを目指す世界的賞金レースANA AVATAR XPRIZEが開始されていますが、このテーマが選ばれるにあたり大きな原動力となった「TELESAR V」の後継のテレイグジスタンスプラットフォームとなります。
TELESAR VIの特徴は、テレイグジスタンスロボットとしては世界に類いのない67自由度を実現したことにあります。身体がどの程度自由に動けるかの指標として、独立して制御できる関節の数を表す自由度(DOF)があります。TELESAR Vでは、これが53でしたが、TELESAR VI では、これを大幅に増加させ67自由度を達成しました。これまでにも人体模型用としては64自由度や114自由度の人間型ロボットは存在しましたが、それらではテレイグジスタンスができませんでした。TELERSAR VI では、視聴覚の臨場感伝送と人間の134自由度の非拘束な計測を合わせて実現することでAVATARロボットの67自由度を制御して、テレイグジスタンスを可能としています。特に、意のままに動く足をもったことにより身体所有感が大幅に増大し、自分が新たなロボットの身体を持ったことがより体感できるようになりました。
プレス向け資料 PDFダウンロード :458KB
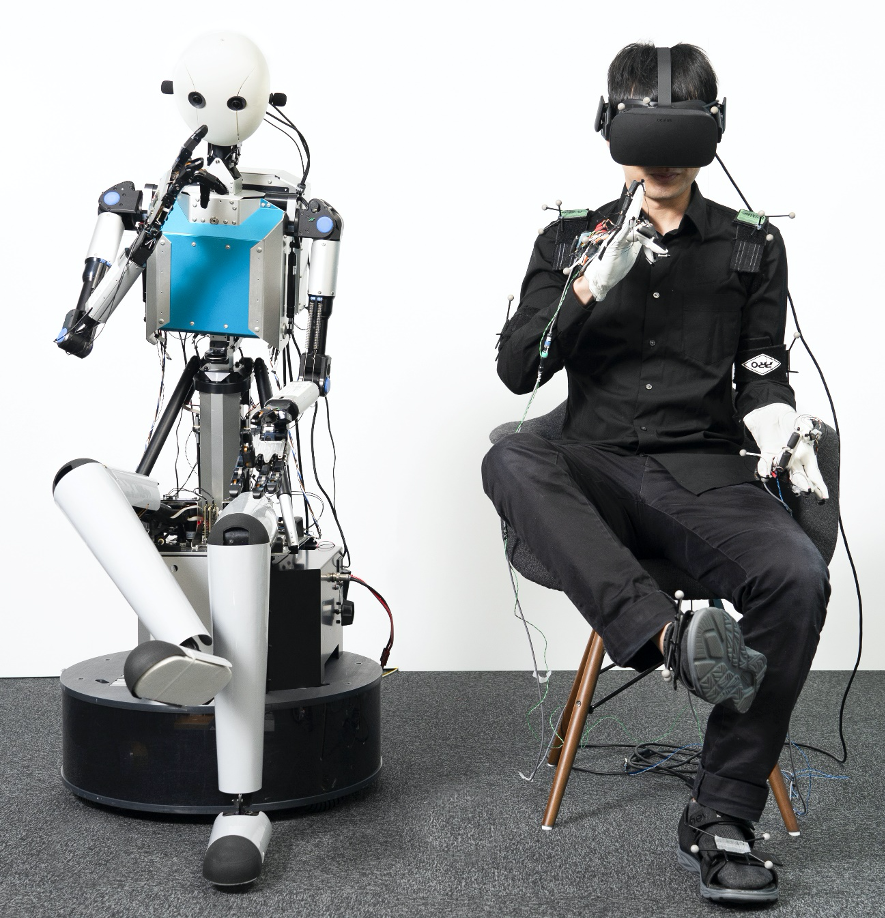
TELESAR VIのマスタースレーブシステム
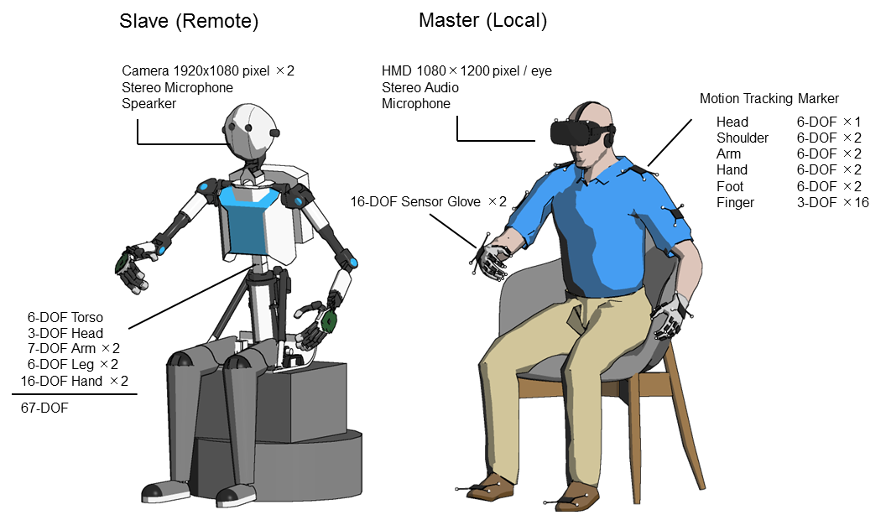
TELESAR VIのシステム構成