| 汎用的な方法で計測・伝送・提示可能な情報メディアとしての触覚 | 触原色 (Haptic Primary Colors) |
| 触原色原理に基づく一体型触覚伝送モジュール | 触原色成分の加え方 |
汎用的な方法で計測・伝送・提示可能な情報メディアとしての触覚
現在の視聴覚メディアは、基本的に視聴者の身体運動を伴わない受動的なメディアです。現在、視聴覚のみを伝える受動的なメディアの発展は飽和状態にあり、その限界も見え始めています。そのようななか、現在の視聴覚メディアを革新的に進展させる新しいメディアが世界中で追求されつつあります。従来の視聴覚メディアをインタラクティブな能動的な視聴覚メディアに発展させることに加え、更に根本的に変革して、バーチャルリアリティやロボットなどを用いた能動的な身体運動をともなう 「身体性」に基づく革新的な情報メディアを生み出して行くことが求められているのです。
この「身体性」を伝えるには「触覚」の伝送が必要不可欠となりますが、 特定の状況で使えるアドホック(ad-hoc)な触覚伝送技術は開発されているものの汎用的に利用可能な触覚伝送技術は未だ存在しません。すなわち、視覚や聴覚に匹敵するような汎用的な方法で、触覚を記録し、伝送して再生することができないのです。さらに言えば、視覚、聴覚、触覚を能動的に統合し身体的な経験を記録・伝送・再生する技術が確立されていません。
身体的経験の記録・伝送・再生技術の、従来の受動的な視聴覚体験の伝送技術との最も本質的な違いは、身体運動による人と外界環境とのインタラクションの結果として生じる触覚情報による、身体的経験の自己帰属感の存在です。すなわち、触覚情報の伝送を可能とすることが、身体的経験の伝送の実現において最も重要な鍵となるのです。
現在の触覚伝送技術の研究においては、触覚伝送の技術は数多く提案されているものの、特殊な状況を再現するものであったり、様々な素子を組み合わせた大型かつ複雑な装置であったりしています。現在の触覚技術の産業応用においては、スマートフォンやエンターテイメント機器において、ピエゾアクチュエータ等を用いた振動提示モジュールが広く用いられていますが、ここで伝送される感覚情報は、単純な振動に留まり、実物体から得られるような細やかな触感や、身体運動によって生じる全身の運動感を伝送するには至っていません。触覚は目や耳などの特定の身体部位のみで知覚される視覚や聴覚とは異なり、全身に分布する多種多様な触覚受容器の反応が身体運動の中で統合されて知覚される複合的な感覚であるため、振動や力などの単独の触感覚要素の単なる組み合わせでは再現が不可能です。そのため触覚技術の本格的な産業応用を実現するためには、視覚における撮像モジュール(例えばCCD)と提示モジュール(例えばLCD)に相当するような、人が感じている感覚情報と等価な情報を汎用的に記録・再生できるモジュールと、単なり組み合わせではない本質的かつ汎用的な提示法が必要不可欠となるのです。
視覚において、アドホックな方法ではなく、汎用的な方式で、記録のための撮影モジュールや再生のための提示モジュールが存在する理由は、実は、この記録・伝送・再生が、人間の視覚特性に基づくものであるからです。
人間の視覚は、電磁波のうち光と呼ばれる0.40~0.75μmというきわめて限られた領域を検出するにすぎません。自然の色には、様々の波長の光が混じっています。これを、すべて記録し、伝送して提示する方式では、原理的には可能であっても、実際には装置として実現できないのです。視覚情報の記録・伝送・提示を可能にしているのが、人間の錐体細胞の波長選択制の特性を利用した三原色原理に基づく方式です。すなわち、自然の色と全く同じスペクトル構成のものを使わなくとも、RGB(赤緑青)を担うそれぞれの錐体細胞に、自然の色とスペクトルが異なる光を用いても、自然の色を加えたのと同一の発火パターンを励起させれば、あるいは、人間の目に同一のRGBの光を提示すれば、人間にとっては、まったく同じ色に見えてしまうという事実を利用しているのです。
従って、自然の色を三原色に分解し、その値を記録し、伝送して、それを、三原色で合成すれば、簡単かつ合理的に視覚情報を伝送し再現できます。また、それを、記録しておいて再生することもできるのです。記録したモノを取り出して、加工したり編集したりすることもできます。全く新しい映像をつくりだすことさえ可能です。印刷物やテレビなど、ありとあらゆる視覚情報はまさにこの原理を利用しているのです(図1)。視覚情報がメディアとなっている状態と言えます。この三原色原理は、人間の感覚特性に基づいた方法で有り、それ故に、汎用的な方法になりえて現在に至っているのです。
それでは、触覚においても同様なことは可能でしょうか。もし、可能であれば、触覚においては、どのような原理に基づいて、計測・記録し、それを伝送して、人に提示すればよいのでしょうか(図2)
それを解決するための提案が、「触原色(Haptic Primary Colors)」原理です。「触原色」原理は、視覚の三原色が眼球の錐体細胞の波長特性に基づいているのと同様に、触覚の生理学的知見に基づき、分解し、伝送し、提示しようとする技術概念です(図3)。それが可能となれば、触覚を汎用的な方式で、計測・記録し、伝送して、再生・提示することができるようになります。それにともない、CCDやLCDに匹敵するセンシングと提示のモジュールや素子を作製することが可能となって産業応用も進むことになります。つまり、触覚が視覚や聴覚に匹敵する情報メディアとなるのです。

図1
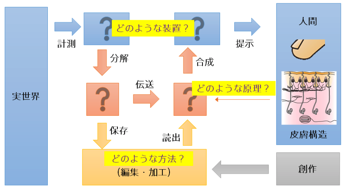
図2
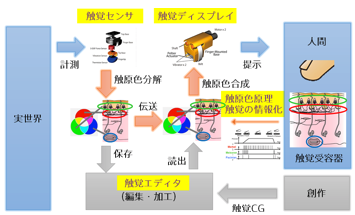
図3
| 汎用的な方法で計測・伝送・提示可能な情報メディアとしての触覚 | 触原色 (Haptic Primary Colors) |
| 触原色原理に基づく一体型触覚伝送モジュール | 触原色成分の加え方 |
触原色 (Haptic Primary Colors)
人間の感覚は「特殊感覚」と「体性感覚」とに分けられます。特殊感覚 (specific sensation) とは、視覚であれば眼球、聴覚であれば耳などのように対応した特別な感覚器が存在する感覚のことを指しています。「加速度」という感覚も、五感のうちには数えられていませんが、耳(その中の前庭:三半規管と卵形曩・球形曩)という感覚器が対応しているという意味で特殊感覚に分類されます。
一方、体性感覚 (somatic sensation) とは、体分節性の感覚という意味で、大きく分けると皮膚に由来する皮膚感覚 (cutaneous sensation) と、内部の筋とか腱に由来する姿勢や運動の感覚である固有受容感覚 (proprioception) とに分かれます。固有受容感覚は自己受容感覚とも訳されています。そして実は、この皮膚感覚と固有受容感覚という体性感覚の全体こそ、広い意味での触覚と呼ばれているものです。
ちなみに、狭い意味で触覚といった場合には、本来的には、温・冷・痛などの感覚も含まれる皮膚感覚の中の、接触覚とか圧覚を意味しています。この接触覚や圧覚は皮膚の中にあるメルケル細胞、マイスナー小体、パチニ小体やルフィニ終末などの感覚器に対応しています。皮膚全体がへこんだり引っ張られたりした場合にその変形や振動が感覚器に伝わり感覚が生じるのです。
また、能動的触覚といって、自ら体を動かして触れることで、皮膚だけでなく筋の筋紡錘、腱のゴルジ受容体などの感覚受容器が刺激されて起きる固有受容感覚との総合的な感覚もあります。このように見てくると、触覚というものが一つの感覚器に対応した、触れているかいないかといった単純な感覚ではなく、固有受容感覚まで含めた、幅広い感覚の総合であることがわかります。
さて、人間が広義の触覚によって、ある物体、例えば鉄の玉を認識するプロセスを考えてみましょう。まず触れることで人間は形状を知るわけですが、直に指で触らず、指に厚手の手袋をはめて、それを介して鉄の玉に触れても、腕、手、指の関節がどう動いてどんな形になったということから「球」と推測できます。このことからも明らかなように、大まかな形状の認識は皮膚ではなく、筋紡錘やゴルジ受容器などの固有受容感覚によっています。また大まかな形状に加え、硬さとか、バネのような反撥力を感じたり、水の中で腕を動かしたりするときの抵抗感などの感覚なども、固有受容感覚に由来するのです。
皮膚感覚はもっと細かい、「テクスチャー」と呼ばれる表面の細かい形状パターンを認識するものです。この感覚は、厚い手袋をした状態では生じず、直に触ることが必要です。この感覚は先述した能動的触覚によってさらに認識精度が向上します。因みに、この固有受容と皮膚感覚が一体となった運動をともなう触覚のことを、ハプティクス (触運動知覚:haptic perception, haptics) と呼んでいます。持って触れることだけでは鉄とまでは判別できないわけですが、それが金属だろうと認識できるのは、テクスチャーに加え温冷を感じる皮膚感覚によっているのです。
以降、この皮膚感覚を触覚とよび議論します。
人間が直接ある物体を指の表面で触った時の感覚を伝えるために、人間の指の表面に、実際の物体と全く同じ物体を提示しなければならないのであれば、触覚を情報メディアとして扱うことはできないわけです。視覚の場合、例えば物体の色は実際のスペクトルと異なっていても、人間のRGBのそれぞれを担う錐体細胞が同一の発火をすれば同じ色に見え、この原理こそが、テレビやカラー写真やカラーの印刷物を可能としていることは先に述べたとおりです。それが、色の三原色というものです。同じことが触覚でもいえないでしょうか。つまり、触原色というものが存在するのかということです。
その存在を裏付ける事実が、人間の触覚において明確に異なる種類の感覚器が存在していることにあります。メルケル細胞、マイスナー小体、パチニ小体やルフィニ終末がそれにあたります。また、温冷痛に反応する自由神経終末も存在します。神経生理学研究の成果として、メルケル細胞とルフィニ終末は圧力と剪断力、マイスナー小体は低周波振動、パチニ小体は高周波振動を検知することが知られている。また、物体に接触した際には、メルケルとルフィニで変位、マイスナーで速度、パチニで加速度を検知しているといわれています(図4)。

図4 Å.B. Vallbo and R.S. Johansson: Properties of cutaneous mechanoreceptors in the human hand related touch sensation, Human Neurobiology, vol.3, pp.3-14, 1984.より改変
実物体には、凹凸形状、摩擦、熱、弾性といった多くの物理特性があります。これを、すべて再現する必要があれば、実物をもってこなければならなくなり、情報メディアとしての提示は不可能です。しかし、皮膚感覚が生じる状況を考察するならば、物体を触ると皮膚表面に、力と振動と温度変化が生じ、それが伝わって、これらの感覚器が反応して触覚が生じることがわかります。そうであれば、物体の凹凸形状、摩擦、熱、弾性といった物理特性がどうであれ、感覚器が、その物体を触った時と同一に反応すれば同じ触覚が人間に生じることになります。これは、まさに、視覚の場合と同じです。
その際、感覚器に同一の発火を引き起こすには大別して二つの方法があります。
第一の方法は、生理空間に基底を求める方式です。電気刺激で基底となる感覚器そのものを選択的に発火させるという方法です。電極をすべての感覚器の場所に埋め込んで刺激するという侵襲的な方法は実用的でないことから、皮膚表面からの経皮電気刺激で、しかも選択的に感覚器を刺激するのです。この方法については、陽極刺激によってマイスナー小体のみを選択刺激可能であり、陰極の電気刺激で皮膚電極を介してメルケル細胞を刺激して、圧覚に似た感覚を伝えることが可能です。しかし、パチニ小体を選択的刺激することができないし、温冷も選択的に刺激できません。また、逆に本来は痛覚を生じないような刺激でも、痛覚を伴ってしまうことがあります。従って、生理空間の基底を直接選択的に刺激する方法では、汎用的な刺激を与えるにいたっていないのが現状です。
第二の方法は、視覚のRGBを基底とする方法と等価な方法で、物理空間で基底を選択する方式です。メルケル細胞とルフィニ終末が圧力と剪断力、マイスナー小体が低周波振動、パチニ小体が高周波振動、自由神経終末は、温、冷、痛に応答することから、実物体を触ったときの人間の皮膚表面での、圧力と剪断力、すなわちベクトル力としての「力」、低周波から高周波までの「振動」と、「温度」が、実際に触っていないときでも、同一に提示されれば、人間は、同じ感覚を得ることになります。これが、人間の能動的な運動により、変化して行きますが、それを人間の動きに追従して忠実に再現すればよいことになります。これは、視覚において、光のすべてのスペクトラムを再現せず、RGBに対応したスペクトラムのみを基底として用い、その基底に基づく合成で、ほとんどすべての視覚情報を再現している方式と類似の方式です。すなわち、物体の有する凹凸形状、摩擦、熱、弾性といった物理特性をすべて再現するのではなく、その物体との接触によって皮膚表面に生じる、「力」、「振動」、「温度」の三つの物理量を基底として、それらの時間変化を記録し、伝送して、それらの基底を基に様々な触感を合成するのです。
この「力」、「振動」、「温度」の三つの物理量を基底とする第二の方法が、触原色原理の基本形です。
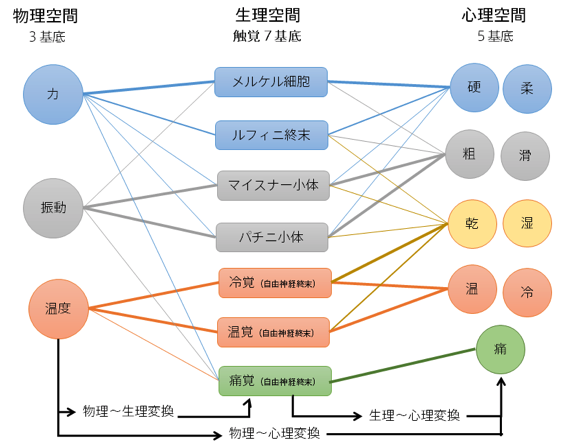
図5
上記の物理空間から心理空間への変換を、途中の生理空間を省いてマッピングのかたちで表したものが下記の図5bです。物理空間に於ける、力、振動、温度の三基底を軸にした空間内で、それらの大きさやパターンによって、触感が合成されている様相を示しています。触感の表現としては、色を、「浅黄色」とか「オレンジ色」、あるいは「うすくれない」などと言語表現するのに対応して、「つるつる」、「かさかさ」とか「ぬるぬる」などの、オノマトペ(onomatopoeia)を用いています」。厳密には、色のRGB値による表現のように、触感も力、振動、温度の時間変化パターンで表現して特定するのが理想ですが、オノマトペ表現が、直感的には分かりやすいメリットがあります。
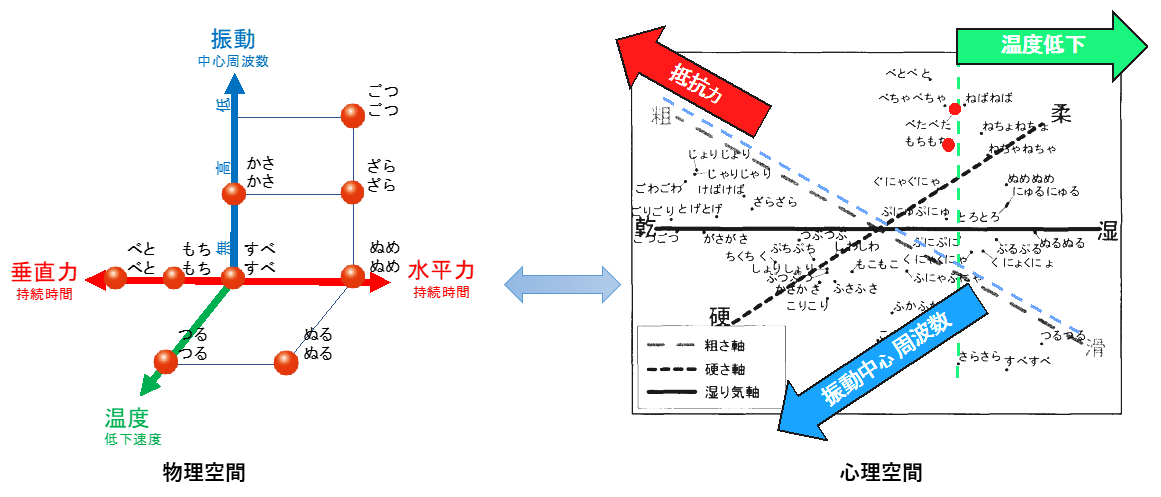
図5b
この関係を、実験的に調べたものが下記の論文になります。これは、最初の試みであり、更に深化させてゆくことにより触感を自由に作り出す触覚エディターなどの設計論に繋がってゆきます。
田島 優輝,加藤 史洋, 井上 康之, 舘 暲:力・振動・温度を触原色とする触感提示デバイスにおける触感再現手法, 日本バーチャルリアリティ学会論文誌, vol.24, no.1,pp.125-135(2019.3)[PDF]
さて、この「力」、「振動」、「温度」を基底とする方法には、小型化にむけて問題があります。「力」の提示は、力という物理量のもつ特性から、力を及ぼすための固定場所(接地)が力を加える点と別の場所に必要となることから、指腹に力を加えるために、例えば、指の甲の部分に接地させ、そこから力を加える必要があるからです。これは、提示装置そのものを作製する際に、その刺激部位の付近にのみに装置を収めきれないことを意味します。従って、必然的に比較的大きな空間を必要とし、装置をデバイスとして小型化する際の大きな制約となるのです。また、一般的な皮膚表面への力提示では、押す方向への圧力は提示可能でも、引く方向への力が提示できません。これにより、ねちょねちょ感などの提示が難しくなっています(図6)。
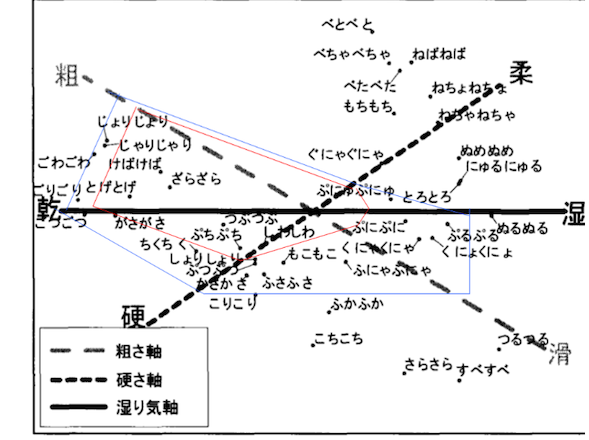
図6
一方、選択的な電気刺激を行ってメルケル細胞を刺激することで力の感覚を生じさせられることが分かっています。また、電気刺激を用いて力刺激を行えば、引く方向でも力を感じさせることができ、ねちょねちょ感などの提示も可能となります。これらのことに鑑み、「力」、「振動」、「温度」に加えて、「電気」を基底に含める第三の方法も有望です。つまり、第二の方法に第一の方法を加えるという方法です。なお、「力」を「電気」にすべて置き換える場合でも、4基底のうちの「力」の関与を零とした場合とすればよく、「電気」を零にすれば第二の方法となります。
電気は実際の通常の物体との接触では、静電気を感じたりする特別の場合を除いては生じませんが、しかし、れっきとした物理量であることから、物理空間の基底として問題はありません。この電気刺激が、圧覚や振動覚、さらには痛覚なども生じさせることから、電気刺激の与え方によって、心理空間における5基底へ効果を及ぼします。特に、硬柔、乾湿などの感覚を与えて、力、振動、温度のみで提示できる感覚の範囲を広めるのです。図7に、電気を基底に加えた触原色のスキーマを示します。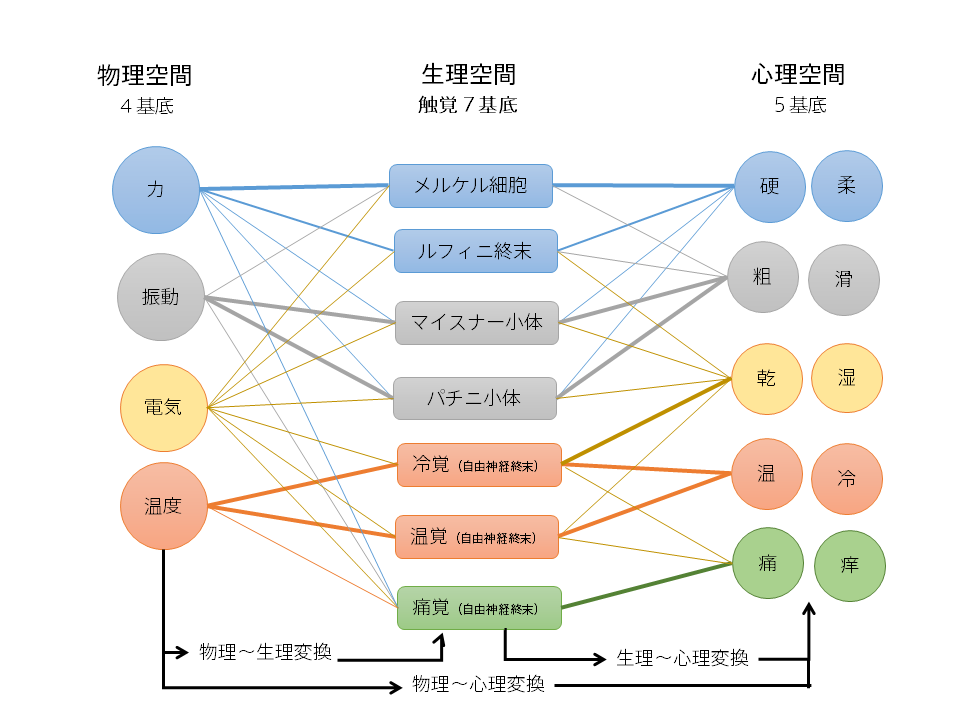
図7
| 汎用的な方法で計測・伝送・提示可能な情報メディアとしての触覚 | 触原色 (Haptic Primary Colors) |
| 触原色原理に基づく一体型触覚伝送モジュール | 触原色成分の加え方 |
触原色原理に基づく一体型触覚伝送モジュール
触原色原理では、触覚を、圧覚/剪断力(メルケル細胞・ルフィニ終末により知覚)/低周波振動覚(マイスナー小体により知覚)/高周波振動覚(パチニ小体により知覚)/冷覚/温覚/痛覚(それぞれ自由神経終末により知覚)の各要素間の時空間的関係性からの合成としてとらえ、触覚の分解と合成を実現します。この触原色原理にもとづき、力・振動覚・冷温覚の各要素を一体的に取得・提示できるモジュールを開発することで、これまで個別の物理特性として捉えられ、その伝送には多数の素子を組み合わせることが要求された力・振動・温度を時空間的に統合し、高い臨場感を有する触覚の伝送を実現することが可能となります。
しかし、小型の触覚伝送モジュールを実現するにあたってはいくつかの技術的課題が存在します。まず、圧覚および低周波振動覚の提示には、一般的にはモータや空気圧等のアクチュエータを利用し皮膚に物理的な力を発生しますが、このような方法では一定以上の小型化は望めません。そこで、経皮電気刺激による触覚受容器の選択的刺激を利用し、圧覚を知覚するメルケル細胞、および低周波振動覚を知覚するマイスナー小体に繋がる神経を皮膚上から電気的に刺激することで、物理的な刺激なしに圧覚および低周波振動覚を自在に生み出す方法が小型化の鍵になります。これまでに、電気刺激の刺激パターンや極性を選ぶことで、圧覚/低周波振動覚それぞれを選択的に刺激できることが分かっています。また刺激電極ついては、フレキシブルプリント基板を用いた薄型・高密度の電気触覚ディスプレイを用いることが可能で、人の触知覚特性上、圧覚の提示に関しては最も細かい指先でも2mmピッチで十分であることが示されています。また圧覚の取得については、同様にフレキシブル基板を用いて、上記の電気触覚ディスプレイに対応した多点計測を可能とする薄型圧覚センサを用い、これらを利用して高密度・多点の圧覚を取得・提示する薄型のセンサおよびディスプレイを構成できます。図8に、2009年10月から2015年3月に行われたJST CREST「さわれる人間調和型情報環境の構築と活用」(研究代表者:舘 暲)で研究開発されたモジュールの実績値と、2014年12月~令和2年(2019年)11月の実施されたJST ACCEL「触原色に立脚した身体性メディア技術の基盤構築と応用展開」(研究代表者:舘 暲)で開目標とされたモジュールの目標値を示しています。開発された実際のモジュール(図9)では、2017年の段階で既に、寸法 27 x 14 x 6mm;重さ 6.3g;2mmピッチ30点の圧覚提示;1〜1000Hz HiFi振動提示;温度の無段階制御が達成されています。
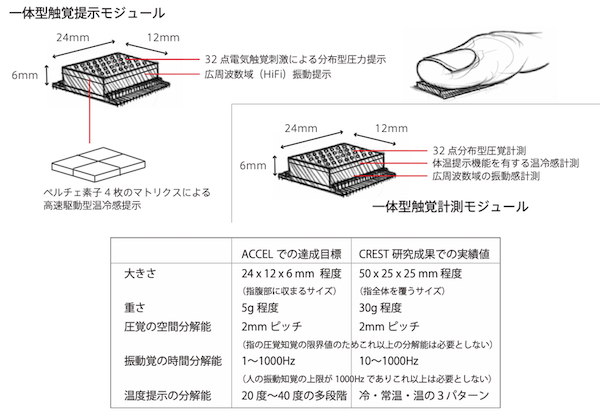
図8
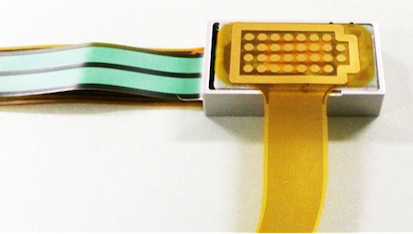
図9 2017年に開発された3触モジュール
高周波振動覚の提示については、これまで多くの振動アクチュエータが開発されていますが、そのほとんどが、200Hz前後の人が最も知覚しやすい周波数帯に共振周波数を設定し設計されている。これは低い消費電力で強い刺激を提示するには有効ですが、一方で、自然な触動作において発生する多様な振動周波数を含む繊細な触感の提示には適しません。そこで、振動覚提示に最適な振動アクチュエータを実現するため、1Hz~1000Hzの広い振動周波数帯において、フラットな特性での振動覚の提示を可能とする小型の振動アクチュエータを用いる必要があります。触覚の生理学的知見として、高周波振動を主に知覚するパチニ小体は、1〜2cm2に1つ程度しか分布していないことが知られており、このことから、振動アクチュエータのサイズを2cm2として設計すれば十分です。
冷温覚の提示については、触原色原理において、絶対的な温度を再現するのではなく、人の皮膚と接触対象との間の熱移動を再現することが必要であることが分かっています。この実現のためには、冷温覚の取得と提示における双方向性、すなわち冷温覚を取得するセンサが人と同等の体温を再現するディスプレイとしての機能を有することが求められるのです。また従来の冷温覚伝送においては時間応答性が低いことが課題とされていますが、人の冷温覚知覚特性を活用し、複数の温度提示素子をマトリクス状に配置し制御することで1Hz程度の温度変化を可能とする高速冷温覚提示手法により、時空間的に変化する温冷感の伝送を可能とします。
人が感性的に感じる触感を触覚の心理空間、その触感を構成する神経パルスを生じさせる触覚受容器等の生理学的要素を触覚の生理空間、触覚受容器を活動させる物理的な刺激を触覚の物理空間と定義すると、触覚伝送モジュールは、電気刺激によるメルケル細胞とマイスナー小体の生理空間における刺激、および振動と温度の物理空間における刺激、のハイブリッドな構成であると捉えられます。そのため、触覚伝送モジュールを用いて任意の触感を提示するには、心理空間上の任意の「触感」を、触覚提示モジュールの各感覚要素に分解し、身体運動に応じてインタラクティブに合成するアルゴリズム、及びそれを簡易に利用可能なソフトウェア環境の構築が必要不可欠となります。そこで、実世界から記録した情報を編集・加工して任意の触覚情報を創造し、体験中の身体運動に併せて適切な触覚制御信号に変換するアルゴリズム、および、実世界から記録した触覚情報を異なる身体運動に対応した新たな触覚情報に変換するアルゴリズム、について一般に利用可能な「触原色エンコーダ」として構築し触覚伝送モジュールと共に提供することになります。
加えて、実際の触感を提示する際には、例えば手に「柔らかい」触感を提示しようとするとき、触覚提示モジュール単体で「柔らかさ」を提示可能な触覚信号は存在せず、手が物体をどの程度押し込んだか、という運動情報に応じて、触原色の各触覚要素において提示する触覚信号を時空間的に変化させる必要があります。また、身体的経験を記録する場面と、それを体験する場面において、ユーザの身体運動が完全に一致するとは限らず、異なる運動状態下で同じ触覚制御信号を提示しても、異なる触感として知覚されてしまいます。そのため、単純に記録した触覚情報をそのまま提示するのではなく、身体運動の差異に応じた適切な変換を行う必要があります。
| 汎用的な方法で計測・伝送・提示可能な情報メディアとしての触覚 | 触原色 (Haptic Primary Colors) |
| 触原色原理に基づく一体型触覚伝送モジュール | 触原色成分の加え方 |
触原色成分の加え方
実際に人間が実世界の物体を指の腹で触った場合には、指の腹の皮膚表面に加わる、力、振動、温度の3刺激の作用点は同一です。しかし、人に提示する提示装置に於いて、力、振動、温度、電気の作用点を一致させることは一般には困難です。
一方、人間の感覚を調べると、作用点が異なっていても同一の感覚を生じさせることができます。また、作用点とは、別のところに感覚を生じさせることも可能です。後者の好例が、ファントムセンセーションです。これは、von Bekesy によって確認された両耳聴による音の定位と同様な皮膚感覚の現象です。ある条件のもとで、2部位に刺激を加えることにより、刺激像を2部位間の刺激部位とは異なる部位に与えることができる。しかも、2刺激部位の刺激の強度差によって、その像の位置を制御できます。これは、振動刺激に対しても、また電気刺激に対しても生じることが知られています(図10)1,2)。
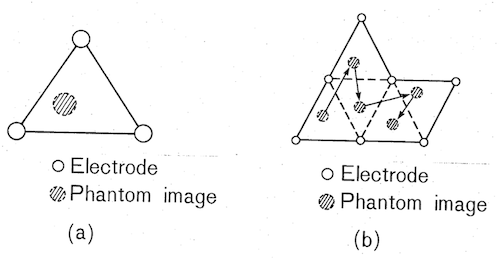
図10
このファントムセンセーション現象の存在は、振動刺激を、刺激部位でない部位に感じることができることを意味しています。
例えば、著者らが構成した、TELESAR V とよぶテレイグジスタンスロボットのハンドで計測した圧覚情報と振動情報を、手袋に仕込んだ提示装置で提示する際に、指腹には、圧力と剪断力を加え、指の横両側から振動を提示したところ、圧覚を感じる指腹に振動刺激も感じました(図11)。ファントムセンセーションにより振動刺激が中央に感じられたと考えられます。さらに、圧覚を与えた場所に、刺激を感じやすくなっている効果もあると見られました。
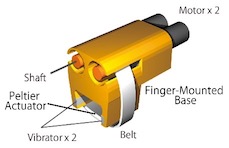

図11
力の提示部分を、電気刺激にかえても、同様に、電気刺激部分に振動刺激をファントムセンセーションによって提示可能です。そのファントムセンセーション像は、電気刺激により、より鮮明に定位します。つまり、上記のファントムセンセーションによって、振動刺激を力、及び電気刺激の部位に定位させ、なおかつ、力提示や電気提示によって、振動刺激のファントムセンセーション像を鮮明に、力や電気刺激を提示した部位に定位させることができるのです。
温度提示について同様です。温度刺激を、側面から加えた場合、片側だけでは、指腹には定位しませんが、振動刺激を指腹に提示すると、その部位に定位することが知られています。左右から加えると中心に定位するファントムセンセーションが、この場合もあり、それが、振動、力提示、電気刺激により鮮明化します。なお、温度の場合、素子の特性と熱の性質から、提示に遅れが生じますので、この遅れを補正するために、センサに接触型の温度センサに加え、非接触の温度センサを組み込むことなどが必要になることがあります。
これらのことから以下のことが可能となります。
・力提示を刺激の作用点に配し、振動、温度、電気刺激のいずれか、あるいは任意の組み合わせの刺激子を物理的に離れた場所に配して、ファントムセンセーションにより、その刺激の感覚を、力の作用点に定位させること、また力の提示によりファントムセンセーションによる定位像を鮮明化することにより、力・電気・振動・温度の触原色の提示部位を一致させること。
・電気刺激提示を刺激の作用点に配し、振動、温度のいずれか、あるいは両者を物理的に離れた場所に配して、ファントムセンセーションにより力の作用点に定位させること、また電気刺激の提示によりファントムセンセーションによる定位像を鮮明化することにより、電気・振動・温度の触原色の提示部位を一致させること。
・振動提示を刺激の作用点に配し、温度を物理的に離れた場所に配して、ファントムセンセーションにより振動の作用点に定位させること、また振動の提示によりファントムセンセーションによる定位像を鮮明化することにより、振動と温度の触原色の提示部位を一致させること。
上記に基づけば、素子を水平に多数配置して、配置した点に振動と電気と温度の刺激を一致させて与えることができます。すなわち、素子の数以上に一致した刺激点を増やすことが可能になるのです。図12は、テレビのカラーマスクのように、連続的に多数配置した例を示します。図中において、Eは、電気刺激のための電極であり、Vは、ピエゾ素子などの振動子であり、H/Cは、温刺激または冷刺激のためのペルチエ素子あるいはヒーターです。電気刺激のため使用する電極以外は、アース(接地)として使用することも可能です。ここで、この素子配置構造体は、身体の形状に適合しやすいように、シリコンゴム等の可携性素材やフレキシブルなシート状の素材を用いることができ、手の平(掌)や、腕や、背中、腹部などの広い面を刺激するのに好適です。
図12の水平配置パターンの例では、振動子Vの隣に、電極Eを配置し、その隣にペルチエ素子H,Cを配置する繰り返しパターンの単位ですが、この例に限られず、例えば、身体の感覚的分解能に応じて、適宜、繰り返しパターンの構成単位を変更することもできます。
冷温刺激や振動刺激よりも、電気刺激の方が、感覚的分解能に優れています。そのため、電極Eは密に配置し、振動子VとヒーターH、ペルチエ素子Cは、疎に配置することによって、より細かい弁別ができる触覚感覚(電気や力の感覚等)に対しては高解像度で出力し、比較的粗い弁別の触覚感覚(振動や温度の感覚等)に対しては、素子の数を減らしてコスト等を抑えて高解像度な素子配置構造体を作ることも可能です。
詳しくは、参考文献3を参照ください。
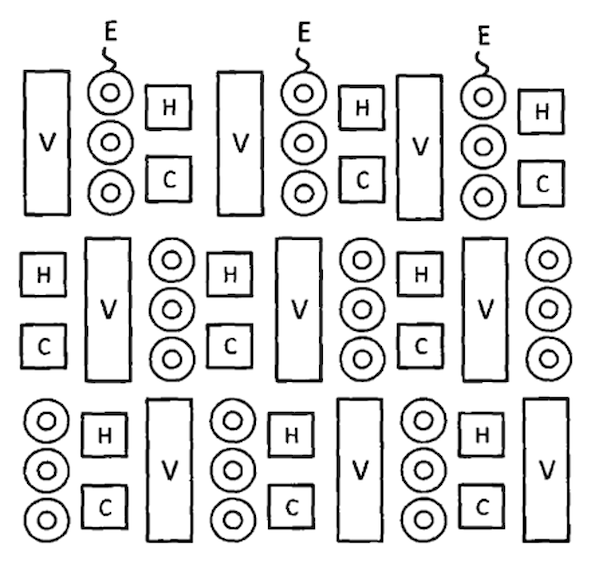
図12
1) 谷江 和雄, 舘 暲, 小森谷 清, 阿部 稔: 電気パルス刺激における強度差ファントムセンセーション像の位置弁別特性, 計測自動制御学会論文集, Vol.15, No.4, pp.505-512 (1979.8)
2) Susumu Tachi, Kazuo Tanie, Kiyoshi Komoriya and Minoru Abe: Electrocutaneous Communication in a Guide Dog Robot (MELDOG), IEEE Transactions on Biomedical Engineering, Vol.BME-32, No.7, pp.461-469 (1985)
3) 舘 暲,南澤孝太,梶本裕之,佐藤克成,仲谷正史:触覚情報変換装置、触覚情報変換方法、および触覚情報変換プログラム、ならびに、素子配置構造体,PCT WO 2017/175868 A1 (2017-10-12) [2017年4月7日提出]
米国 特許第10,621,837 B2号(2020-04-14)
日本 特許第6703688号(2020-05-13)
中華民国(台湾)特許第 I710934号(2020-11-21)
中華人民共和国(中国)特許第4412316号 (2021-05-11)
大韓民国 (韓国)特許第 102278456号 (2021-07-12)