-「盲導犬ロボット」の概念の提唱と工学的実現可能性の実証-
| 概要 | 盲導犬ロボット研究の背景と目的 | 盲導犬ロボットのシステム設計 |
| 盲導犬ロボットの研究開発 | 研究のきっかけ、経緯などのエピソード | 参考文献 |
概要
盲導犬ロボットという概念を世界で初めて提唱するとともに、このアイディアの工学的な実現法を理論的に研究し、この方法で実際に実現可能であることを、MELDOGと呼ぶ実験用ロボットを試作し具体的に示しました。この研究は1977年度から6年計画で工業技術院の特別研究「歩行誘導機械の研究」として行ったものであり、移動ロボットの知的なナビゲーション技術と人間と機械のコミュニケーション技術とを確立し盲人の街路歩行補助を行うための基礎的な研究です。MELDOGと呼ばれる試作実験装置のMARK IからMARK IVが試作され、それらを用いた実験の結果、盲導犬ロボット実用のための技術的な可能性が実証されました。
また、この研究の過程で、人間とロボット間の双方向情報伝達手段を研究し、人間の皮膚の電気刺激などにおける情報伝達特性を明らかにしました。さらに、この研究に関連して脚機構により移動する歩行ロボットの基礎的な研究も行いました。なお、この研究は、福祉機器開発の先駆的な役割を果たした点でも評価が高く、1993年8月から3ヶ月間開催された韓国大田国際博覧会の政府館でデモンストレーションされるなど、博覧会などへの出展も多い。
本研究の関連特許は16件で、盲人用歩行補助器評価装置、特願昭55-186572 (1980-12-26)、特許第1462696号 (1988-10-28)で、科学技術庁長官選定第42回注目発明を、歩行訓練補助装置、特願昭56-044784 (1981-03-27)、特許第1369281号 (1987-03-25)で、科学技術庁長官選定第43回注目発明を受賞しています。また、本研究に対して、1983年9月10日にIEEE/EMBS(米国電気電子工学会医療工学部門)学会論文賞(Electrocutaneous Communication in Seeing-Eye Robot (MELDOG))、1987年11月5日に機械技術研究所所長賞研究業績賞(盲導犬ロボットに関する研究)、1987年11月27日に日本ロボット学会論文賞(移動ロボットの自律誘導の一方法)を受賞しています。
盲導犬ロボット(MELDOG)
MARK I (1977), MARK II (1978), MARK IIb (1979), MARK III (1981), MARK IV (1983)
| 概要 | 盲導犬ロボット研究の背景と目的 | 盲導犬ロボットのシステム設計 |
| 盲導犬ロボットの研究開発 | 研究のきっかけ、経緯などのエピソード | 参考文献 |
盲導犬ロボット研究の背景と目的
暗い部屋に急に入ったとき、あるいは不意の停電時など、視覚が利用できないことが、いかに不便であり、また心理的に不安であるかが痛いほどわかる。盲人の要望のうち、自由に一人で行動したいという願いは大きい。 この単独行動のことをindependent travelあるいはmobilityと呼んでいます。このモビリティを可能とする要素として次の3つの過程が重要です。すなわち、① 次の一歩の確保、② 方向づけ、③道案内をも含むナビゲーションの3つです。
①は、自分の前方に自分自身の体を通すことのできるドア状の空間ないしはトンネルを仮想的に考え、その空間が安全に確保できるかを見極めることであり、盲人歩行の最も基礎的なステップです。特に段差などの足もとの情報、また雨樋や木の小枝、看板など上方の空間状態、前を歩く人や横切る車などの障害物の状況を刻々ととらえていく必要があります。
②は、オリエンテーションと呼ばれる。ある環境内での自己と物の位置関係を認識し空間に位置づけることです。これは、例えば道に沿って道なりに歩くといった行動を行うための基礎となります。
③は、最も重要な要素であって、メンタルマップと呼ばれている。盲人の頭の中に構成されている地図と、盲人に理解可能な形に変換された通常の地図、ないしは歩行補助装置を通じて得られる誘導情報とから、自分の希望する場所へ自力でたどりつくことを可能にする過程です。
①から③の機能、すなわち、①次の一歩の確歩、②方向づけ、③道案内を含むナビゲーションを総合した意味での盲人の歩行の補助は、介助者が一緒に同行するか、あるいは盲導犬により行われています。古来、イヌは人に代わって盲人を導くのに利用されていましたが、本格的な訓練が始まったのは20世紀に入ってからであり、比較的最近のことであります。盲導犬は従来から使われている歩行補助手段のうちで、①から③の機能を兼ね備えるとともに、①についても多大な情報の処理をイヌが行い、盲人が見逃した危険な状況のみを知らせてくれるため、盲人は安心して自分の残存感覚機能に集中でき、最も優れた手段の一つであるが、動物であるがゆえの固有のいくつかの欠点を有しています。
すなわち、その「訓練」、「飼育」に莫大な労力を要します。その訓練に耐えるイヌの数は極めて少なく、また7~8 年程度の寿命しかないため、 1981年7月当時、登録されている保有盲導犬は全国で352頭にすぎませんでした。2016年4月現在は、984頭になっていますが、それにしても十分な頭数にはほど遠い状況です。「飼育」については、食事、排泄、手入れ、病気などの問題が常にあり、家族が1人増えた程度の手聞がかかります。また、都市化された環境、特にマンション、アパート、社宅などの住居ではペット規制や散歩させる場所の問題から実際上利用できません。そのような状況から、盲導犬の有する優れた機能をもつ歩行誘導機械が切望されていたのです。
舘暲らは、上記の背景に鑑み、 1年間の予備的な調査研究をへて、1977年4月から6年計画で「歩行誘導機械」の特別研究を行いました。これは、前述の①から③までの機能を有する歩行補助装置を技術的に可能とするための研究であって、盲導犬がその3機能を有することから、盲導犬の機能をロボット技術で実現することを目指す研究ともとらえることができるため「盲導犬ロボット」の研究と呼ばれていました。
1983年3月までの研究開発期間中に、 MELDOGと呼ばれる試作実験装置のMARK IからMARK IV までを試作して、それらを用いて実験の結果、 上述の3機能を機械で実現することの技術的な可能性が明らかにしたのです[1,2]。
| 概要 | 盲導犬ロボット研究の背景と目的 | 盲導犬ロボットのシステム設計 |
| 盲導犬ロボットの研究開発 | 研究のきっかけ、経緯などのエピソード | 参考文献 |
盲導犬ロボットのシステム設計
従来の補助器の設計は、単独歩行の過程を、①次の1歩の確保、②方向づけ、③ナビゲーションの順序(部分→全体)で達成しようとしていたといえます。一方、盲導犬の訓練過程を考えると、その順序はむしろ、③→②→①と逆の順序(全体→部分〉となっています。すなわち、 (i)盲人の命令に従って直進、左折、右折などを先導する「服従」の訓練が行われ、そののち、 ( ii)障害物のある場合には盲人の命令に従わず停止して、そのことを盲人に知らせ、場合によってはそれを回避する「賢い不服従」の訓練が行われます。盲導犬のンステムにおいては、「服従の機能」が③と②の機能に対応し、「賢い不服従の機能」が①の機能に対応していると考えられます。 それらに加えて、「人とイヌとのコミュニケーション」が重要な役割を果しています。
盲導犬ロボットにおいては、盲導犬の機能を上記の、 (i)服従、 (ii)賢い不服従、 (iii)マンーマシーンコミュニケーションに大別し、 それらを機械に適した方法で、実現することを図っています。この盲導犬ロボットシステムにおいては、盲導犬と同じ③→①の設計法がとられています。すなわち、③のナビゲーションの機能、換言すれば、これを可能にするためにロボット自身が自己のいる位置と方向を常に同定していることを、最も重要な基礎としているわけです。
その位置と方向の同定は、盲導犬ロボットがもつ町の地図すなわちデータベースを用いて実現されます。そのデータベースをマップと呼び、例えば通常の地図を計算機により画像処理することによって機械向きに予めつくられた一種の機械用の地図です。このシステムでは、種々の情報のうち特に交差点と交差点のつながりの関係を主体としています。
ロボットは、地図の情報と自分自身のセンサからの情報をつきあわせながら走行します。その場合の最も重要なポイントは、自分自身の内部状態から知る自己の位置や方向を、外部センサで得られた確実な情報で修正し誤差をキャンセルすることです。すなわち、ある一定の距離は、自分自身の内界センサ情報とマップ情報のみから慣性走行し交差点などの要所で外界センサ情報とのつきあわせを行って、いままでの誤差をキャンセルして、また慣性走行を続けます。その際に、交差点などの要所ごとに外界から確実な位置と方向の情報を得る必要があります。
誤差をキャンセルするための外界の目印(ランドマークと呼ぶ〉として、どのようなものを選べばよいでしょうか。大きく分けて自然界に既に存在する電信柱やビルの壁などの自然道標をランドマークとして選ぶ方式と、簡単な目印を道路の要所に人工的に敷設しそれを利用する方式とがあります。後者は、精度の面や誘導情報採取の容易さからは優っていますが、わざわざランドマークを敷設しなければいけないところに施行上の問題点があります。
1977年のプロジェクト開始時点では技術的な見通しから、自然道標は見合わせ、とりあえず人工的なランドマークを交差点などの要所に敷設して、それらにより上記の位置と方向のつき合わせを行う方式を採用しましたが、研究の後半では、自然道標を利用する方式に移行したのです。しかしどちらでも、全体のシステム設計の概念や誘導方式は同一の思想に統一されています。
人工的なランドマークとしては、経済的に見て設備投資が少なくなるように極めて単純な長さ2.5m、幅15cm程度の地面とコントラストのあるマークを利用しました。そのようなランドマークに関する地図を探索し適当な経路を見出し、 ロボットのもつ超音波や光学式センサにより路上の障害物の状況を知りながら、ロボット自身がまず街路を自由に走行します。ロボットは動きながら盲人の動きを実時間で計測します。その結果、盲人が安全な行動をしている場合には盲人に何らの拘束をも与えず、盲人の行動が危険である場合にのみ主人である盲人にそのことを知らせるようにシステムが設計されたのです。
具体的な目標仕様としては以下のとおりに設定されました。
1) 逐次指令モードにおいては、 ロボットが分岐点のある交差点付近のランドマークに達すると、そのランドマークに追従後停止し盲の主人に交差点に関する情報を伝えます。伝える情報は交差点番号やランドマークコード、その交差点の種類などであり、伝達方式は定エネルギパルス列を用いる電気刺激などです。主人は自分の頭の中にあるメンタルマップとロボットからの情報との総合判断にもとづいて次に進むべき方向を決定しコマンドグリップからそれをロボットに指示します。ロボットは指示された方向へ進むための情報をマップにより検索しその情報に従って歩行誘導して次のランドマークへと進みます。
2)自動誘導モードにおいては、与えられた出発点と目的地のコードから、走行に先だって最適経路の探索を行います。その後、そのシーケンスに従って実際の誘導を開始します。このモードでも、分岐のある交差点では停止しますが、それは主人からの進行方向指令を待つためのものではなく、そこが交差点であることや次に進むべき方向をロボットの側から主人に知らせておき、主人がロボットに追従しやすくするためのものです。主人からの指令はスタート信号となります。
3)障害物がない場合ロボットの走行速度は主人の歩行速度に合わせ、ロボットと主人の間隔を一定に保ちます。ロボットの後方には安全歩行領域を設定し、もし主人がその領域から外れた場合には、そのことを主人に警告します。
4)路上に歩行通過不可能な危険物や障害物がある場合にはそれを検出し、主人の指令には従わず停止して主人にそのことを知らせます。通過可能領域があれば、その障害物を回避して前進します。もし回避が不可能な場合には、2)の手順に戻り、目的地までの別のルートを探索し経路の変更を行います。
5)移動している障害物には以下のように対応します。すなわち、ロボットの前を同一方向に同じような速度で動いている場合には、前方の物体(通常は歩行者〉に合わせ速度を制御し移動する。前を横切る物体がある場合には、それが行きすぎるのを待ちます。こちらが止っていても衝突する危険がある場合には相手に対して警告を発するといった融通性のある行動をとるのです。
それらの機能を実現するハードウェアは、(i)移動方向制御サブシステム、(ii)中枢サブシステム、 (iii)動力サブシステム、 (iv)通信サブシステム、(v)誘導サブシステム、(vi)障害物検出サブシステムとからなります。 図1にそのシステム構成図を示します。
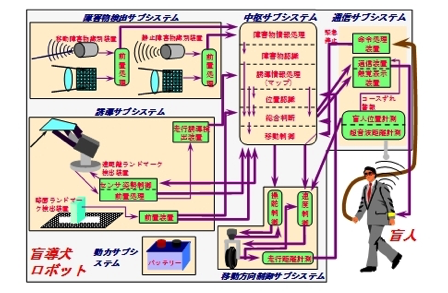
図1 盲導犬ロボットのシステム構成
| 概要 | 盲導犬ロボット研究の背景と目的 | 盲導犬ロボットのシステム設計 |
| 盲導犬ロボットの研究開発 | 研究のきっかけ、経緯などのエピソード | 参考文献 |
盲導犬ロボットの研究開発
このシステムを目指した最初の実験機は、1977年の夏に完成しました(図2)。このMELDOG MARK I は、 主に( i)、(iii)、(iv)のサブシステムを構成し、3)の機能を実証したものです。

図2 盲導犬ロボット実験機MELDOG MARK I (1977年夏に完成)
人間の速度に応じてロボットの移動速度を制御し、安全領域から人間が逸脱した場合、そのことを人に電気刺激で知らせるなどの実験を行った。
通常の走行状態で、盲人がロボットに引っぱられて誘導されるような状況は、安全性や使い勝手から好ましくありません。ロボットの速度は通常の使用状態では、盲人の走行速度に合わせるべきです。盲人は、ロボットのことは忘れて、自分自身の残存感覚機能に集中して自己のペースで歩行します。 ロボットは、後ろを歩いている主人の位置と姿勢とを実時間で測定して、主人の歩行速度に合わせて走行し、 ロボットと主人との間隔を一定に保ちます。また、主人の行動が安全である限り何らの拘束も与えず、主人が危険な場合にのみ盲人にそのことを伝えます。すなわち、 ロボットの後方に安全な歩行領域を設定し、この領域から盲人が逸脱したり、方向が悪かったりする場合にのみ主人に警告を与えます。盲人はベルトのバックルの部分に超音波の送信素子をつけ、受信はロボット上に設けた2つの受信素子を用いて行います。計測の原理は三角測量法であり、姿勢については、発信素子からの超音波を受信できなかった状態から検出しています。
マスターガイドと呼ぶ、超音波計測システムでは、アナログ素子を積極的に利用して実時間演算を可能としています。なお、 ロボッ卜から人への信号伝達には電気刺激を用いております[3]。
昭和53年の冬に完成したMELDOG MARK II においては、(ii)、(v)のサブシステムを追加して、1)、2)の機能の実証を行いました(図3)。交差点のつながり具合、交差点間の距離などの情報を有限オートマトン型のデータベース(マップ)としてロボットに与えます。出発点と目的地のコードをロボットに指示すると、 ロボットは、そのマップを用いて最適の経路を導き出し、マップとして記憶している情報により自律的に移動を行います。このマップとロボットの内界センサによる移動軌跡と、実際の環境との間の誤差は、交差点ごとに離散的に敷設された長さ2.5m、 幅15cmの白色テープをランドマークとして用いて修正しました。ランドマークを検出するランドマークセンサは、ロボットから光を投影し、その反射光をフォトトランジスタアレイで差分的に検出する構造になっています。最初の実験は、1978年の末、当時東京の井荻にあった機械技術研究所の構内で行われました[4]。
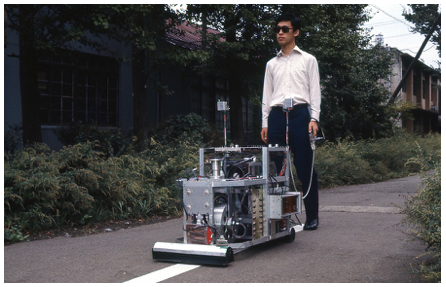
図3 盲導犬ロボット実験機MELDOG MARK II (1978年冬に完成)
地図とランドマークとを利用して街路誘導を行うことに成功した。
上記の人工的なランドマークのほかに自然界に既に存在する自然道標をランドマークとするための基礎的な検討を行いました。その一例として、ロボット上に搭載したテレビカメラなどの検出器を用いて道の路肩に関する情報を得て、それにより走行する方式を検討しMELDOG MARK IIを改良したMARK IIbを用いて室内の限定された環境内で、1979年春に検証しました(図4)。CCD (Charge-Coupled Device) カメラからの視覚情報から、できるだけ簡単な処理によって実時間で道の路肩(道と道以外の部分の境界)を検出し、それとロボットとの相対的な位置関係を求めます。路肩から一定距離はなれた路肩と平行な追従ラインを仮想的に考え、 ロボットをその追従ラインに沿って走行させます。本方式の特徴は、その際CCDカメラに首振り動作を加えることで視野の拡大を図っているところにあります[5]。
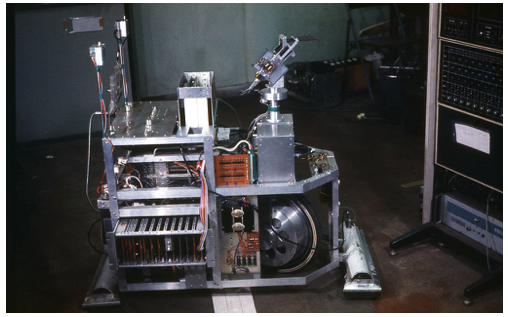
図4 盲導犬ロボット実験機MELDOG MARK IIb (1979年春に完成)
ロボット上に搭載したテレビカメラにより道の路肩に関する情報を得て、路肩に沿って走行する基礎実験を行った。
1981年夏には、 MELDOG MARK IIIとして前述のシステムをまとめるとともに、 (vi)のサブシステムの一部を追加して、4)、5)の機能の一部を実証しました(図5)。
移動障害物を検出するための超音波アレイセンサを配し、移動物体の位置、移動速度、 移動方向をとらえ、(a)前方の同一方向に同じような速度で動いている場合は一般的に前にいる通行人なので、その速度に合わせて移動する、(b)前を横切る場合にはそれが行きすぎるのを待つ、(c)こちらが止っていても衝突の危険がある場合には、相手に対して音声や音響などで警告を発する、などの対応を行います。
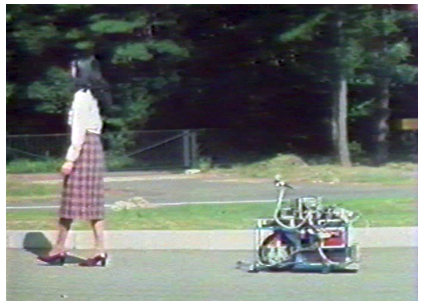
図5 盲導犬ロボット実験機MELDOG MARK III (1981年夏に完成)
移動する障害物を検出し前を歩く人の速度にあわて追従する実験などに成功した。
一方、静止障害物に対応する場合には、その物体の正確な位置や大きさ、形状などの情報が重要です。上記の超音波アレイをスキャンして物体の存在する推定位置を移動しながら定めていく方式を検討しました。さらに詳しい計測を行うためには超音波のみでは不十分であり、視覚センサを用いる必要が生じてきます。そのため、2つのCID (Charge Injection Device) カメラを用いて、両眼の視差を利用した立体視の手法で物体の位置を測定するセンサシステムを開発しました。また、段差への対応のメカニズムの研究を進める一方、その検出の研究も行った。例えばレーザダイオードとPSD (Position Sensitive Detector) を用いた距離センサで円錐状のスキャンを行って段差の検出などが可能となりました。
図6に、機能の総合化を図った研究実験機MELDOG MARK IVを示します。 MARK IVにおいては、従来の人工的なランドマークに代えて、自然界に既に存在する電信柱や壁などの自然道標を利用してナビゲーションを行います。また、障害物検出用のセンサとしても、前方に加えて、上方用、下方用、側方用のセンサをもち、それにより木の小枝や看板、雨樋、あるいは段差などを検出するのです。
また、静止障害物に対しては、障害物センサを左右に回転しながら障害物に関する詳細な情報を集め、
(d) 障害物のまわりに、 ロボットと主人とを安全に通すことのできるスペースがあれば、そのスペースを使って障害物を回避して、次のランドマークに到達するための軌道を創製し、それに従って誘導します。
(e) 安全な通路を確保できない場合には、もう一度、経路探索プログラムを実行して、現在の道を通らずに目的地まで到達できる経路を見出しこの方向に主人を誘導します。
1983年夏に完成したMELDOG MRAK IV は、これまで研究開発した盲導犬ロボットのすべての機能を有しており、それらの機能について実験的な検証が総合的に行われました[6-13]。

図6 盲導犬ロボット実験機MELDOG MARK IV (1983年夏完成)
自然界に存在する自然道標を利用したナビゲーションや静止障害物の検出と回避などが可能となった。
もう一つ忘れてはいけない重要な問題として、このようにして得た歩行に関する誘導情報をいかにして盲人に伝えればよいかという問題の解決があります。これに関しても、人間・機械・環境シミュレータを用いて、盲導犬ロボットからの誘導情報を得て行動する人の動きを実際に近い環境あるいは実際の環境で、実時間に測定し、定量的に評価する研究を行いました。
さて、盲導犬ロボットにおいて開発された方式は、盲人の街路歩行補助を目的としたものではありますが、この移動誘導の方式そのものは、他の分野、例えば工場内やビル内、病院など広い範囲に利用できるものです。本方式の特徴は、離散的なランドマークとデータベースとしてのマップと、 障害物センサによる知能的な移動誘導にあります。すなわち、連続的なマークにくらべ、 交差点におけるマークの敷設の著しい簡易化、マーク間のスペースの他の用途への解放、走行経路の容易な変更、経路の自動探索、各種の障害物への柔軟な対処などの利点をもちます。 例えば、災害時のビル内誘導ロボット、レストランのウエイトレスロボット、工場内や病院内の物品搬送ロボット、原子力施設内の点検ロボット、石油コンビナート内の点検ロボット、見本市などの案内ロボットなどの広範囲のロボットの誘導方式として利用できるのです。
| 概要 | 盲導犬ロボット研究の背景と目的 | 盲導犬ロボットのシステム設計 |
| 盲導犬ロボットの研究開発 | 研究のきっかけ、経緯などのエピソード | 参考文献 |
研究のきっかけ、経緯などのエピソード
―自然とロボット6 盲導犬 桐谷書房(1985年)より引用―(子供向けの本からの抜粋であるため、お話ふうになっている点はお許し願います。)
ここで、わたくしがなぜ盲導犬ロボットを研究するようになったか、そのきっかけについてお話しておきましょう。
子どものころから、わたくしは、数学や物理学で解明される自然界の法則や宇宙のなぞに興味をもっていました。そして、そのようなことを考えられる人間の体のしくみや心のはたらきが、不思議でしょうがありませんでした。
その一方でわたくしは、たいへん犬が好きで、小さいときから飼っていました。
大学に入って機械のことを勉強するようになってからも、人間が犬と心をかよわせられるように、人間と機械のコミュニケーションができるようにならないだろうかと、漠然と考えたりしていました。
そんなことを考えていた大学二年のある夜、ふとスイッチを入れたラジオから『サイバネティクスはいかにして生まれたか』という本の朗読が流れてきました。「サイバネティクス」とは、人間をはじめとする自然界の動きを数学や物理学から説明したり、逆に機械の動かし方の原理を人間や動物の動きにヒントを得て考えたりする学問です。
朗読が終わったとき、わたくしは雷にうたれたような感じがしました。生物や人間と数学や物理学をむすぶ研究があったのです。
わたくしは、その本を書いたアメリカのウィーナーの名をノートにメモしました。すぐに図書館に走り、その本を探しました。読みやすい本とはいえませんでしたが、夢中になって読みふけりました。
その後、大学院に進み、さらに大学の助手となってからも、機械のことを考えるときに常に人間や動物のことをあわせて考えるようになったのです。なかでも、現在のコンピュータでもまねができない高度な能力をもった人間に対する興味はつきません。
1975年の春に移った機械技術研究所(機械技研)のメカニズム課は、そのような研究をするには、もっとも適していました。機械技研はそのころ、たんなる機械の研究から、機械技術を利用して人間と同じ動きを実現する研究に方向を変えようとしていたからです。当時は、その技術を社会福祉に役立てようという考えから、人間の筋肉が発生する電位(筋電)によって動く全腕義手の研究がはじめられていました。
わたくしも、その研究に参加していましたが、そのような機構だけではなく、知能をもったロボットを実現するための研究をしたいという気持でいっぱいでした。人間の能力を機械で実現しようというのが、ロボットの研究です。しかし、そのころ実現されていたロボットは、人の機能の一部を取り出して機械におきかえるという部分的なもので、知能をもった全体的な機能を実現したものは、ほとんどありませんでした。
そこで、わたくしは、人間よりややレベルが下の動物の知能を機械で実現できないだろうかと考えました。しかも、その機能はわたくしたち人間の役に立つものでなくてはなりません。
そう考えていたある晩、飼っている犬を散歩につれていきました。雑木林の中へ入っていくと、月明かりさえない暗い晩ということもあって、あたりは真っ暗です。ところが、犬はスイスイと歩いていくのです。わたくしは、ふと「盲導犬はどうだろうか」と思ったのです。
盲導犬については、アメリカの子ども向けの事典『知識の本』を読んだりしてシーイングアイという名前とともに、ずっと前から知っていました。また、オーストリアの動物学者ローレンツの『人、イヌにあう』という本も読んだことがあり、犬のかしこさについても知っていました。盲導犬のもつすばらしい能力こそ、人の役に立つ知能ロボットで実現するのにふさわしいものだと、わたくしは思いました。
それまで頭の中にあった、人の役に立つ知能ロボットという考えが、具体的な盲導犬ロボットの研究計画となるまでに、長くはかかりませんでした。そのときすでに、どのような機能をどのように実現したらよいのかという基本的な設計図は、頭の中ででき上がっていたからです。
この考えを、きちんとした計画書にして、当時、メカニズム課長だった阿部稔さんに相談しました。阿部さんは、その場で大賛成してくれました。あとで知ったことですが、実は阿部さんも、わたくしと同じ大の犬好きだったのです。
わたくしは、これから作ろうとする盲導犬ロボットに「メルドッグ」という名前をつけることにしました。1975年9月のことです。
研究には着想の部分とそれを実現する部分とがあります。よい着想も重要ですが、それを具体的に実現していくことはさらに大切です。しかもそれは、長い年月と多くの人たちの努力を必要とします。
盲導犬ロボットの研究も、1975年9月から77年春までの予備的研究の期間は、着想の部分を確かなものにするための期間でした。
盲導犬の訓練所や目の不自由な人のための施設などを見学して、多くの人の意見を聞きました。一方では計測、情報処理、制御、通信、電子、メカニズムなど、いろいろな学問的分野から技術的な検討もおこないました。その結果、盲導犬がもっているおもな機能がわかりました。服従の機能、かしこい不服従の機能、人間とのコミユニケーシヨンの三つです。この機能を機械に適した方法で実現しようとする研究の基本的な考え方は、このときにできたのです。
次に必要なのは、研究のための予算です。しかし、これは「ください」といってすぐにもらえるようなものではありません。1976年の春に、特別研究のための計画書を作って提出しましたが、その結果が出るのは、研究をはじめる77年の春になります。
その間も研究は進めなければなりません。ともかく、一部の研究は76年からはじめることにしました。
研究グループには、機械技研から谷江和雄さん、大野武房さん、小森谷清さん、金子真さんなどが加わりました。また、わたくしの先輩である藤村貞夫さんから盲導犬ロボットの話を聞いて、細田祐司さんなどたくさんの大学生や大学院生も集まってくれました。このようにして、研究に興味をもってくれる人の輪が大きく広がり、盲導犬ロボット研究のプロジェクトが誕生したのです。
着想を具体的に実現するため、1977年から本格的な特別研究がスタートしました。スケジュールもきびしさをまし、夜の10時、11時どころか、徹夜になる日も少なくありません。
おかげで、早くもその年の夏には一号機のメルドッグ・マークIが完成しました。メルドッグは、1978年冬に、マークII、1979年春にマークIIbと、ぞくぞくと完成しました。これらの試作機を使って、メルドッグの基本的な機能を確認することができました。
といっても、ここまでの間にはいろいろなことがありました。徹夜を続けてあと一歩で完成というある朝、ちょっとしたことから電気系統のトラブルが起きました。少しずつ何カ月もかけて作ってきたもののすべてが、一瞬のうちにこわれてしまったのです。たまっていたつかれが、どっと出てきます。どうしてよいのか、まったくわかりません。「ともかくきょうはもう帰ろう」と誰かがいいました。
でも、次の日に顔を合わせたときには、みんなの顔はもとのようにいきいきとしていました。こわれたところを作りなおす計画も、すでにできあがっていたのです。
このようなことが何度あっても、わたくしたちのグループのメルドッグに対する情熱は強くなるばかりでした。
その後、さらに多くの研究者や技術者がグループに加わり、研究も活気をましました。1981年にマークIIIが完成し、第一次の研究計画の最後の年である1983年には、もっとも新しいメルドッグ・マークIVができあがったのです。
この年には、うれしいことがいくつかありました。
一つは、1983年6月8日(水)に、皇太子ご夫妻と浩宮様(現在の上皇陛下ご夫妻と天皇陛下)が研究所に来られたほか、外国からも国家元首や著名な研究者をはじめ、たくさんのお客様が来てくださったことです。なかでも、10月28日(金)には、イギリスのガイドドッグズ・フォー・ザ・ブラインド協会副会長のマクファーソンさんが見学され、そのあと、メルドッグに対する熱い期待についてお話してくださったことは、印象に残っています。

また9月には、メルドッグと人間とのコミユニケーシヨンに関するわたくしたちの論文が、IEEE (アメリカ電子電気工学会)の医療工学部門の論文賞を受賞しました。IEEEは、世界でもっとも権成のある学会の一つで、この部門での受賞は、日本人としてははじめてのことでした。
日本で生まれ、日本で育った盲導犬ロボットの研究が、世界に認められたのです。受賞の瞬間、8年間の研究の日々が、わたくしの頭の中をかけめぐっていきました。
| 概要 | 盲導犬ロボット研究の背景と目的 | 盲導犬ロボットのシステム設計 |
| 盲導犬ロボットの研究開発 | 研究のきっかけ、経緯などのエピソード | 参考文献 |
参考文献
[1] 舘 暲: メカトロニクスのはなし, 日刊工業新聞社 (1984.11)
[2] 舘 暲: 自然とロボット(盲導犬), 桐原書店 (1985.4)
[3] 舘 暲ほか:人と一定間隔を保つ移動ロボット制御の一方法,バイオメカニズム, 4,pp.279-289 (1978).
[4] 舘 暲ほか:ランドマークとマップを用いる移動機械の誘導法,バイオメカニズム, 5, pp.208-219 (1980).
[5] 舘 暲ほか-.視線可動型センサを用いる自律移動機械の移動制御,バイオメカニズム, 6,pp.242-251 (1982).
[6] Susumu Tachi et al -Guide DOE Robot-Its basic plan and some experiments with MELDOG MARK I,Mechanisms and Machine Theory, Vo1.16, No.1, pp.21-29 (1981).
[7] Susumu. Tachi et al.: Guide Dog Robot-Feasibility experiments with MELDOG MARK I, Proceedings of 11th International Symposium on Industrial Robots, pp.95-102 (1981).
[8] Susumu Tachi et al.: Electrocutaneous Communication in Seeing-eye Robot (MELDOG), Proceedings of the 4th Annual Conference on IEEE Engineering in Medicine and Biology Society, pp.356-361 (1982).
[9] 舘 暲, 小森谷清, 谷江和雄, 大野武房, 金子真, 阿部稔: 盲導犬ロボットの研究, 筑波研究学園都市主要研究成果集, Vol. 1, pp. 252-256 (1986)
[10] Susumu Tachi, R. W. Mann and D. Rowell: Quantitative Comparison of Alternative Sensory Displays for Mobility Aids for the Blind, IEEE Transactions on Biomedical Engineering, Vol.BME-30, No.9, pp.571-577 (1983.9)
[11]小森谷 清, 舘 暲, 谷江 和雄: 移動ロボットの自律誘導の一方法, 日本ロボット学会誌, Vol.2, No.3, pp.222-231 (1984.6)【日本ロボット学会 論文賞】
[12] Susumu Tachi and Kiyoshi Komoriya: Guide Dog Robot, in M.Brady et al. ed., The Robotics Research 2 (The Second International Symposium), MIT Press, pp.333-349 (1985)
[13] Susumu Tachi, Kazuo Tanie, Kiyoshi Komoriya and Minoru Abe: Electrocutaneous Communication in a Guide Dog Robot (MELDOG), IEEE Transactions on Biomedical Engineering, Vol.BME-32, No.7, pp.461-469 (1985)